

Underwater manipulator structure and robot
An underwater manipulator and manipulator technology, applied in the field of robotics, can solve the problems of poor sealing effect, high cost, poor sealing effect of waterproof structure, etc., and achieve the effect of preventing objects from falling off, simple structure and reliable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
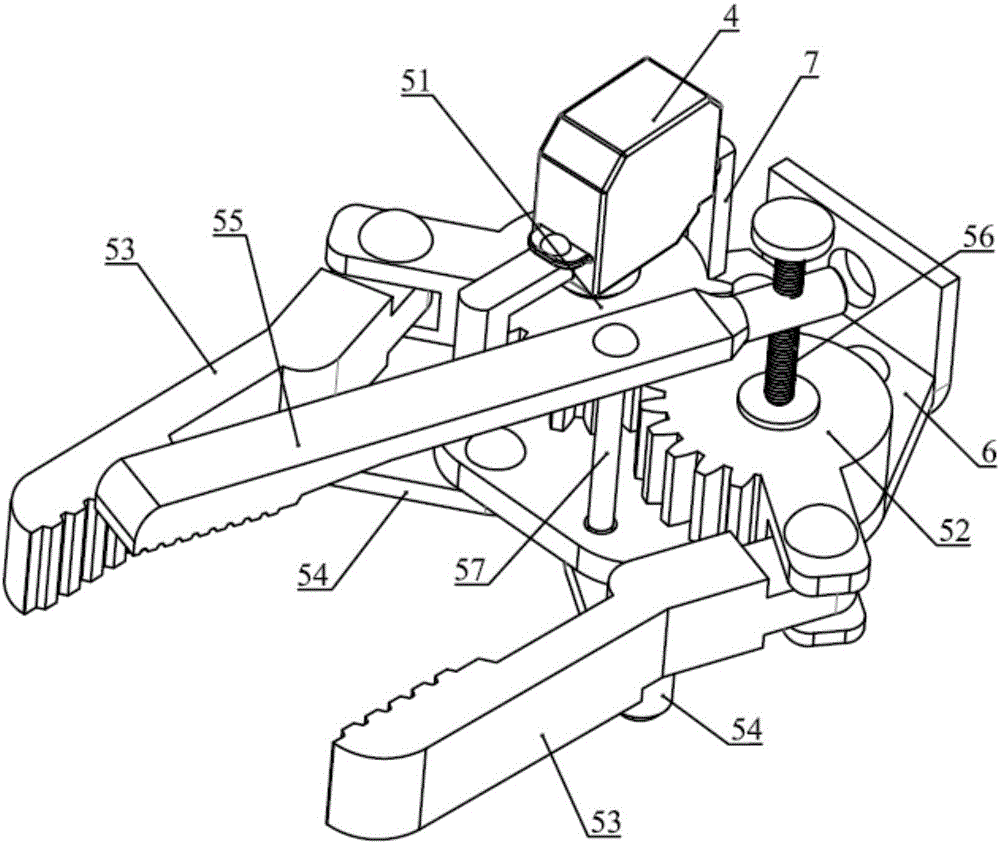
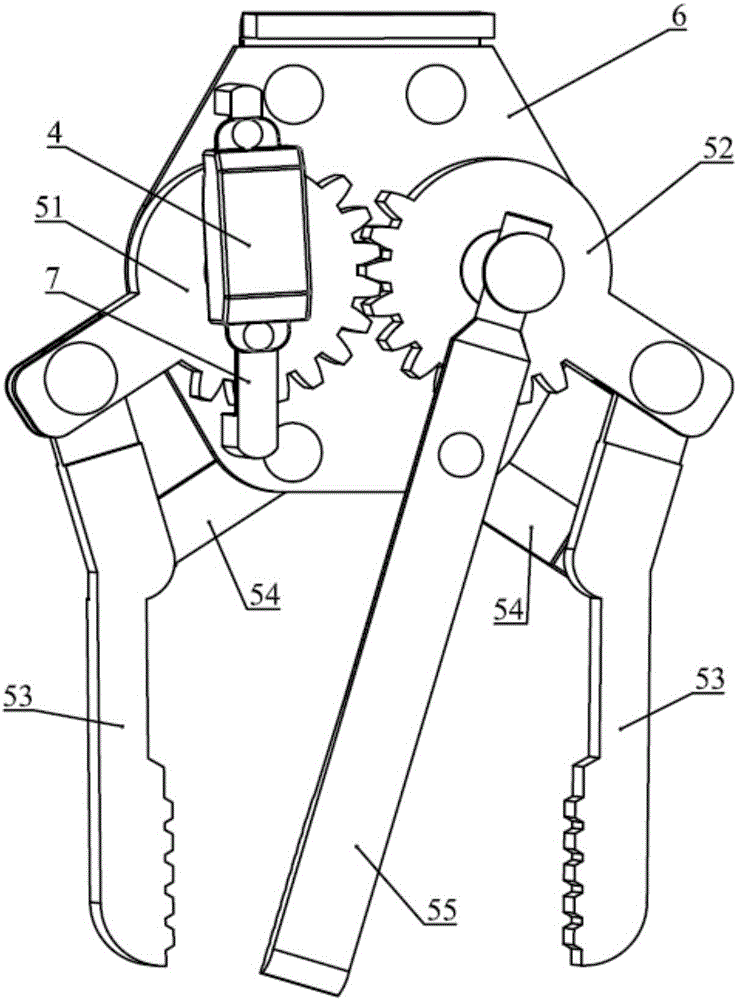
[0033] Such as Figure 1-Figure 2 As shown, this embodiment provides an underwater manipulator structure, including a waterproof steering gear 4 and an actuator, and the waterproof steering gear 4 drives the actuator to grab objects. The waterproof steering gear 4 has good sealing performance, can withstand high-intensity pressure and always maintain good sealing performance during underwater operations, so as to ensure that the underwater manipulator structure can work normally.
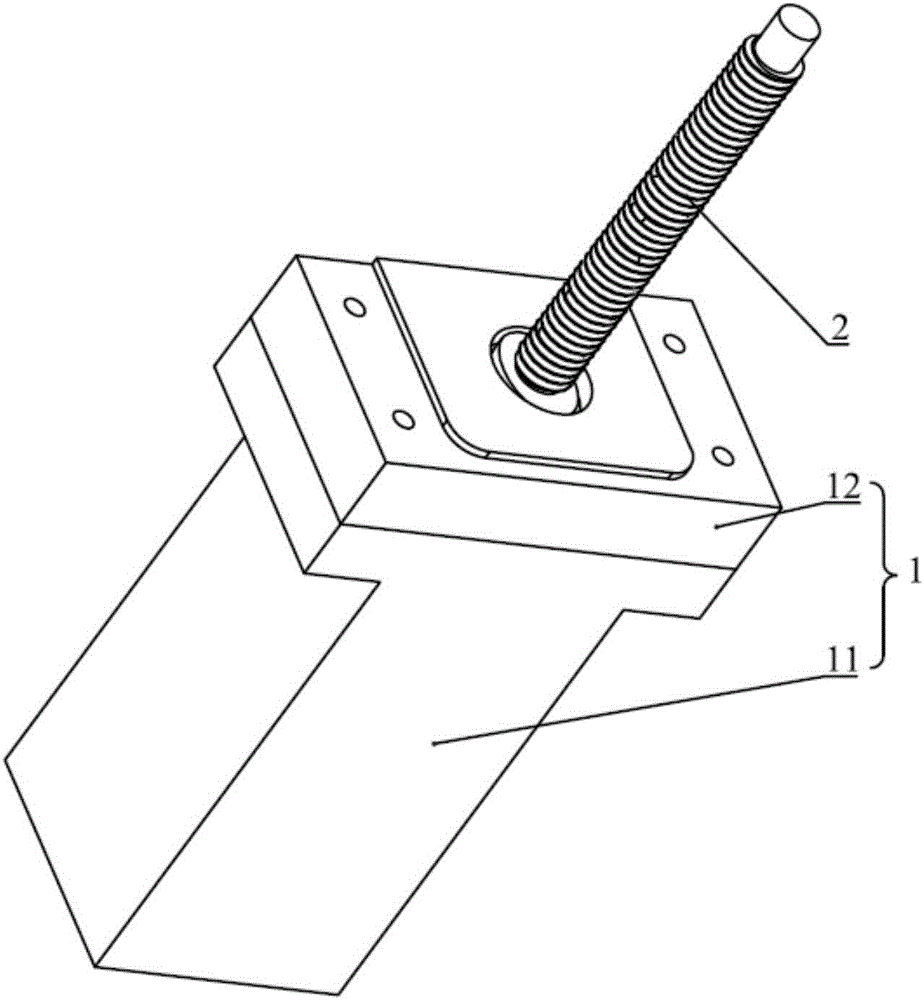
[0034] Specifically, the actuator includes two symmetrically arranged first manipulators 53 and a transmission mechanism. The transmission mechanism includes a first gear 51 and a second gear 52 that mesh with each other. The first gear 51 is connected to the output shaft 2 of the waterproof steering gear 4 , the first gear 51 and the second gear 52 are respectively connected to a first manipulator 53 . The waterproof steering gear 4 drives the first gear 51 to rotate, and the first gear 51 drives ...
Embodiment 2
[0044] This embodiment provides a robot, including the underwater manipulator structure in Embodiment 1. The underwater manipulator structure includes a waterproof steering gear 4 and an actuator, and the waterproof steering gear 4 drives the actuator to grab objects. The waterproof steering gear 4 has good sealing performance, can withstand high-intensity pressure and always maintain good sealing performance during underwater operations, so as to ensure that the underwater manipulator structure can work normally.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More