

Robot positioning and navigation method based on bag-of-words tree cluster model
A robot positioning and tree model technology, applied in navigation, surveying and navigation, navigation computing tools, etc., can solve the problems of large influence on map building, expensive laser sensors, and inability to deal with black light-absorbing substances, etc., and achieve low-cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the above objects, features and advantages of the present invention more obvious and understandable, the present invention will be further described below through specific embodiments and accompanying drawings.
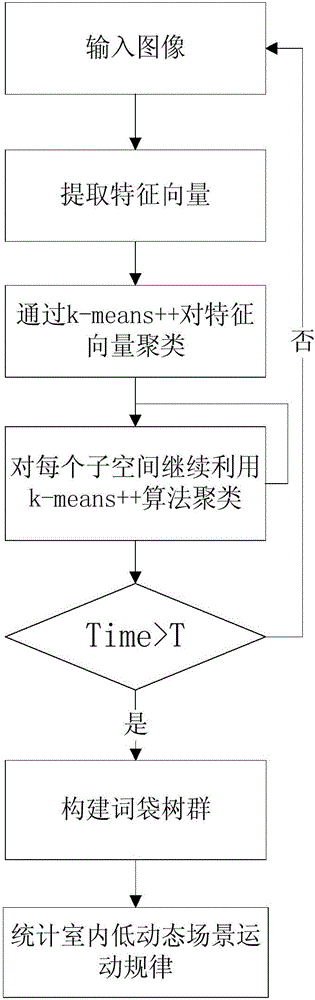
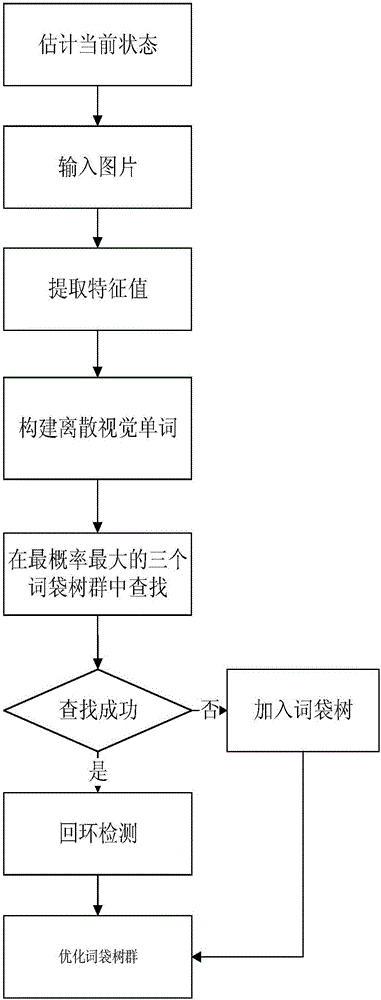
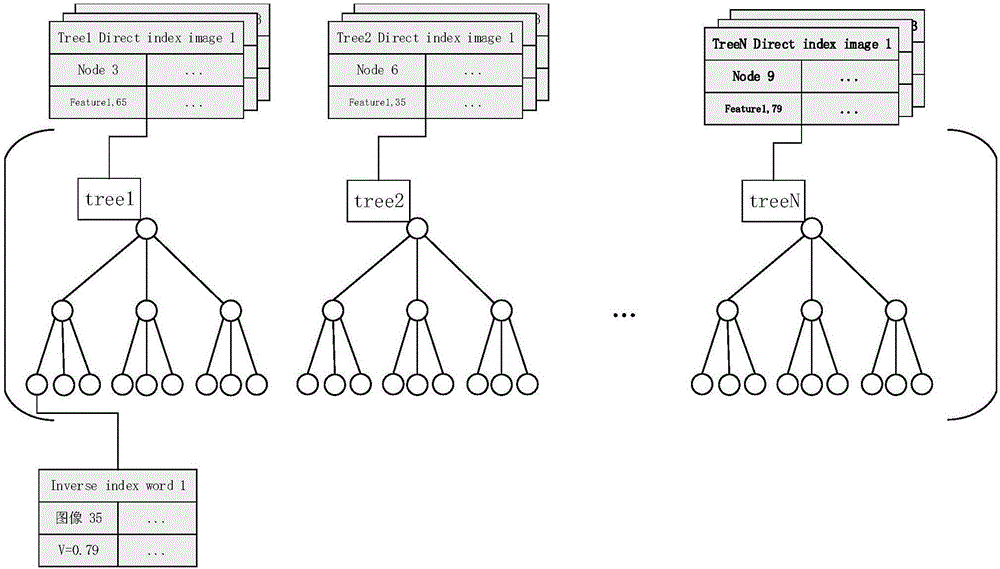
[0029] 1. Establishment of bag-of-words tree group model based on DBoW2
[0030] DBoW2 (References: Galvez-López D, Tardos J D. Bags of Binary Words for Fast Place Recognition in Image Sequences[J].IEEE Transactions on Robotics,2012,28(5):1188-1197.) Structure the image describe. The idea of DBoW2 is to integrate image features into visual words, transform the image feature space into a discrete visual dictionary, and store visual words in a tree structure to speed up the retrieval of features and similar images. Map the new image features to the nearest neighbor visual dictionary in the visual dictionary, and then calculate the similarity of the image by calculating the distance between the visual dictionaries, so as to complete tasks such ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More