Method and system for detecting static pixel point in video image
A technology of video image and detection method, which is applied in the field of multimedia, and can solve the problems of inability to detect still objects and broken objects in video images
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
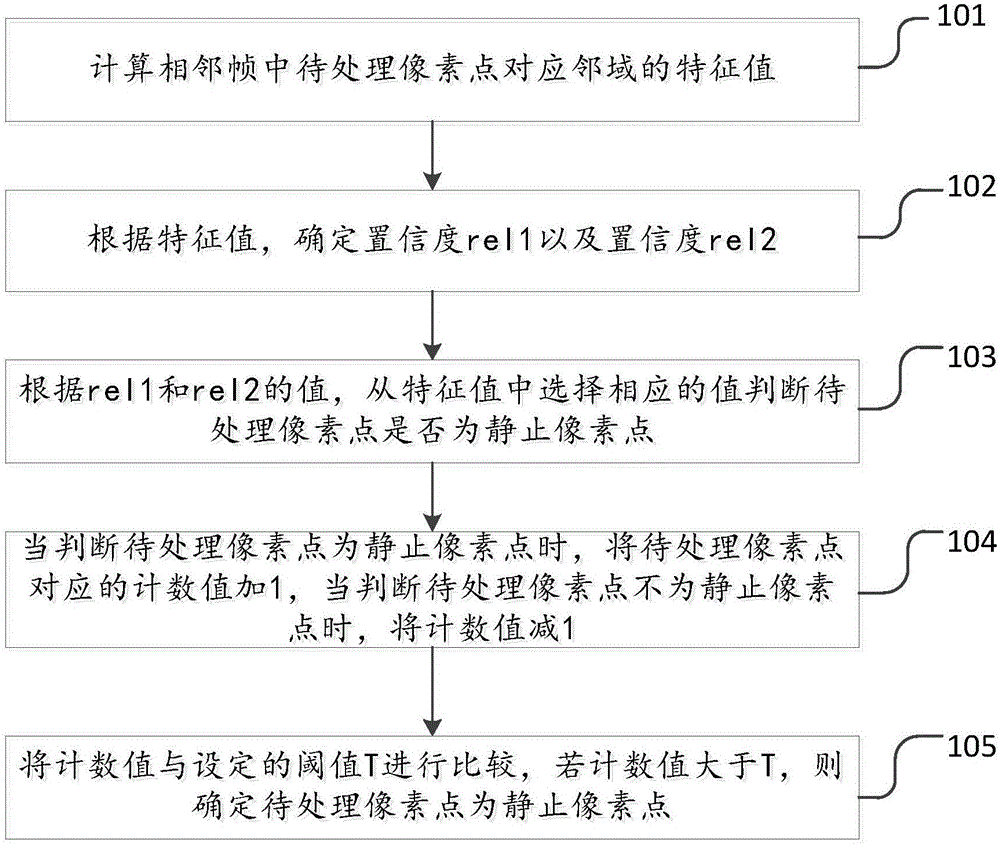
[0025] refer to figure 1 , figure 1 A schematic flow chart of a method for detecting still pixels in a video image in the first embodiment of the present invention is shown, and the specific steps are as follows:
[0026] S101. Calculate feature values of neighborhoods corresponding to pixel points to be processed in adjacent frames.
[0027] In this embodiment, the above feature values include: the normalized cross-correlation coefficient NCC within the neighborhood of the pixel to be processed, the brightness absolute error and SAD used to characterize the pixel similarity of adjacent frames, and the SAD used to characterize whether the pixel has a boundary The luminance variance varY of the pixel, the mean value of the motion vector meanMV used to characterize whether the pixel is still, and the variance varMV of the motion vector used to characterize whether the motion of the pixel is consistent.
[0028] The calculation formula of brightness SAD is shown in formula ...
no. 2 example
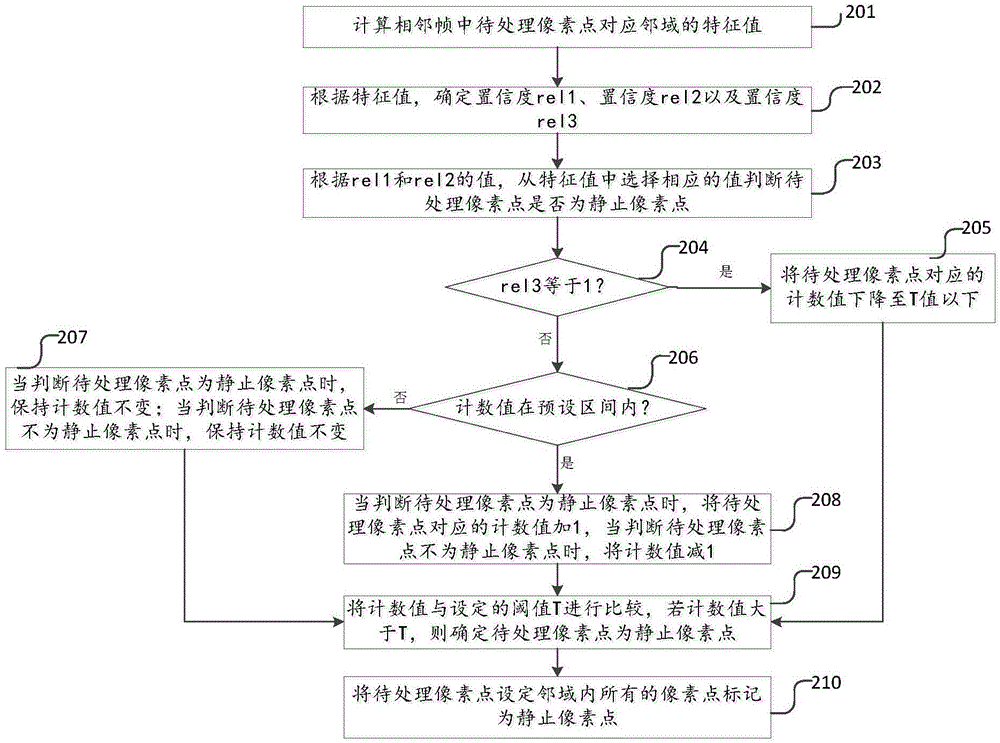
[0048] refer to figure 2 , figure 2 A schematic flow chart of a method for detecting still pixels in a video image in the second embodiment of the present invention is shown, and the specific steps are as follows:
[0049] S201. Calculate the feature value of the neighborhood corresponding to the pixel to be processed in the adjacent frame, and then go to step S202.
[0050] In this embodiment, the above feature values include: the normalized cross-correlation coefficient NCC within the neighborhood of the pixel to be processed, the brightness absolute error and SAD used to characterize the pixel similarity of adjacent frames, and the SAD used to characterize whether the pixel has a boundary The luminance variance varY of the pixel, the mean value of the motion vector meanMV used to characterize whether the pixel is still, and the variance varMV of the motion vector used to characterize whether the motion of the pixel is consistent.
[0051] The calculation formula of br...
no. 3 example
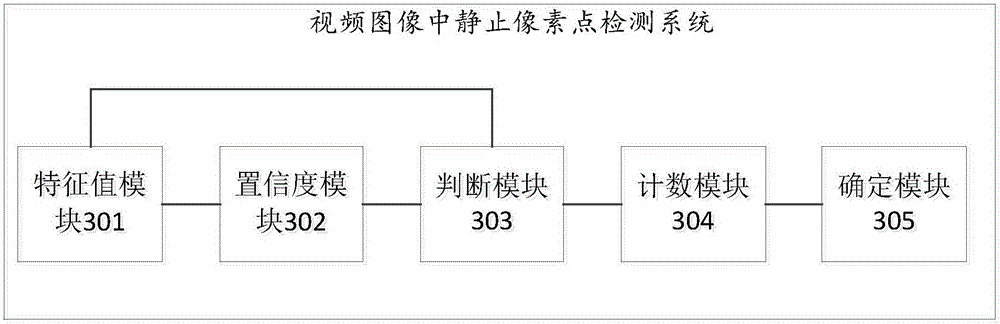
[0077] refer to image 3 , image 3 A schematic diagram of a system for detecting still pixels in a video image in a third embodiment of the present invention is shown, and the system includes:
[0078] The feature value module 301 is used to calculate the feature value of the neighborhood corresponding to the pixel to be processed in the adjacent frame.
[0079] The confidence module 302 is configured to determine the confidence rel1 , the confidence rel2 and the confidence rel3 according to the feature values.
[0080] The judging module 303 is configured to select a corresponding value from the feature values according to the values of rel1 and rel2 to judge whether the pixel to be processed is a static pixel.
[0081] The counting module 304 is configured to add 1 to the count value corresponding to the pixel to be processed when it is judged that the pixel to be processed is a static pixel, and decrement the count by 1 when it is judged that the pixel to be processe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More