

Wheel leg type 3-PUU parallel mobile robot
A mobile robot, 3-PUU technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as difficult implementation, unstable wheel-leg conversion, complex structure, etc., and achieve easy control, compact structure, and high rigidity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in conjunction with the accompanying drawings and specific embodiments.
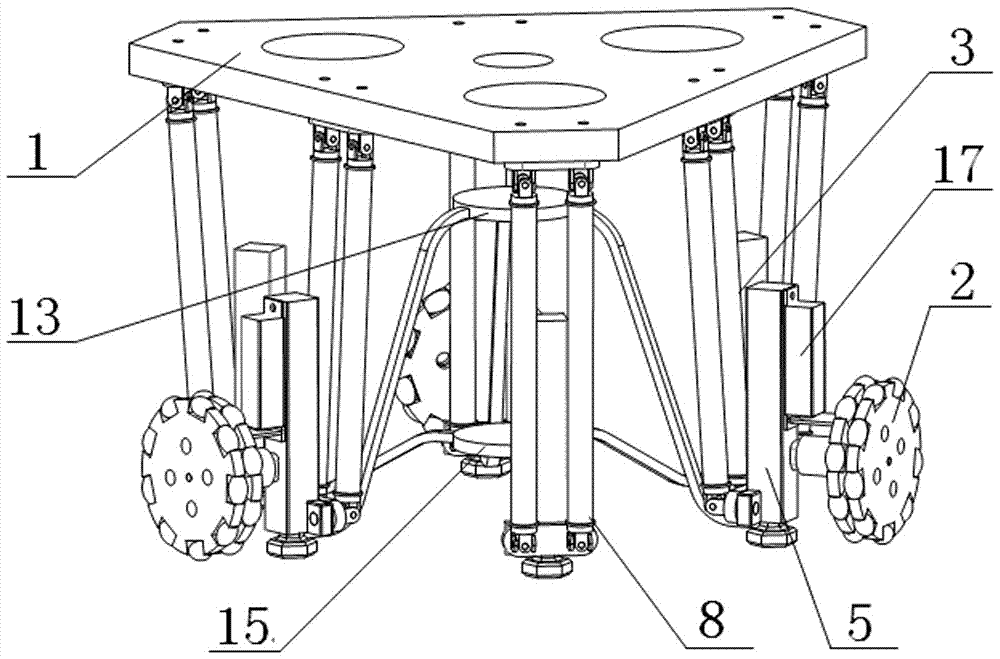
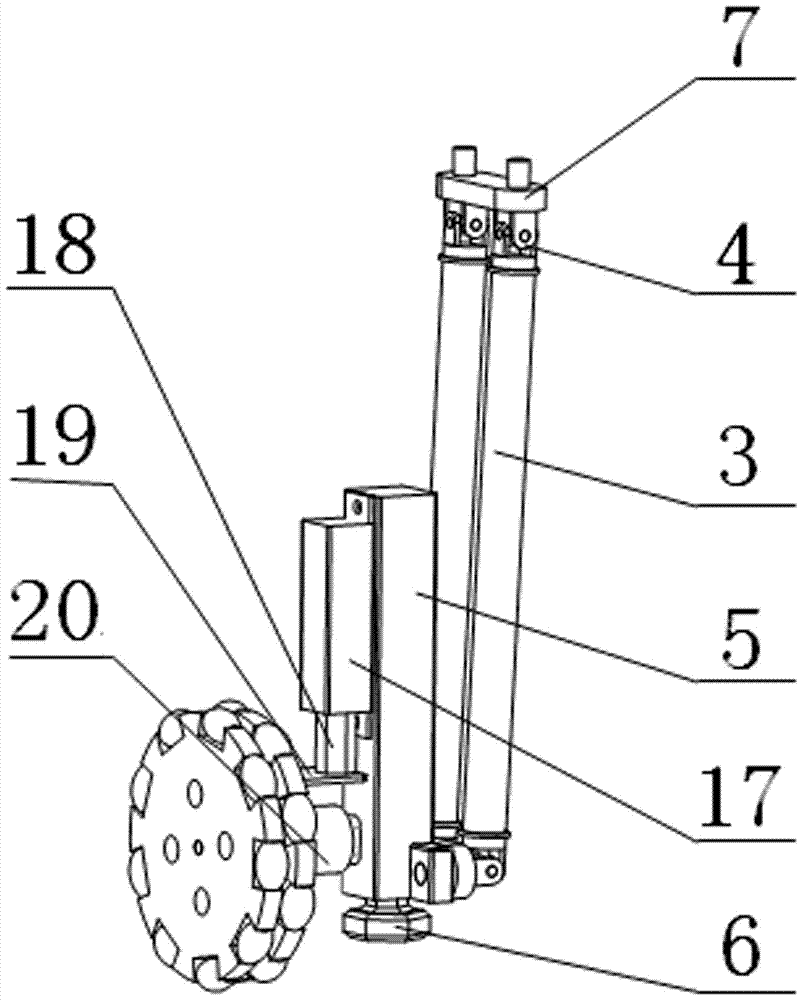
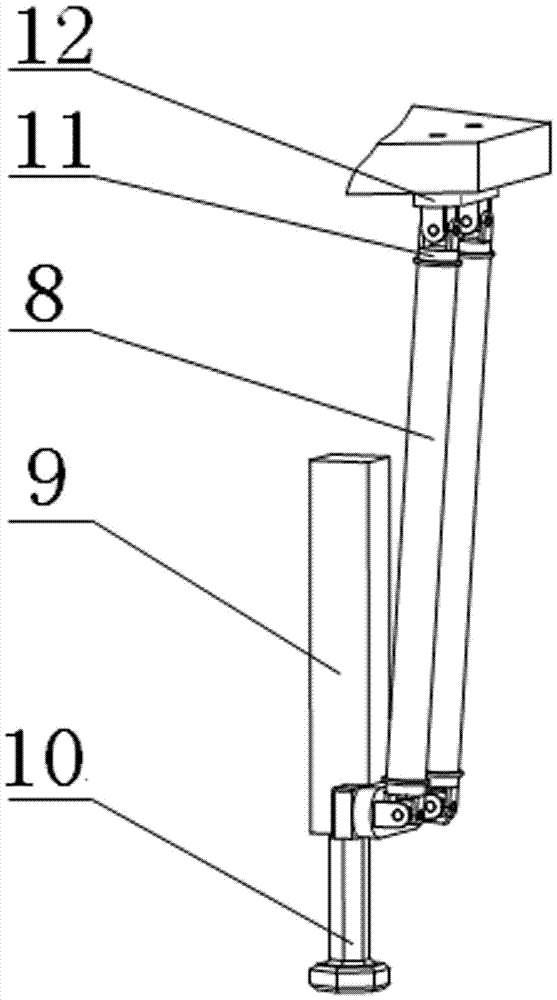
[0034] In terms of overall structural design, the present invention provides a wheel-legged 3-PUU parallel mobile robot. The base platform 1 is connected to the moving platform Ⅰ through three PUU inner branch chains, and connected to the moving platform Ⅱ through three PUU outer branch chains. The linear motor Ⅰ5 of the moving platform Ⅰ is outside the PUU inner branch chain, and the linear motor Ⅱ9 of the moving platform Ⅱ Inside the PUU outer branch, the purpose is to avoid interference. Both the moving platform Ⅰ and the moving platform Ⅱ have three evenly distributed connecting rods, and there is a height difference between the moving platform Ⅰ and the moving platform Ⅱ, which can not only improve the robot's ability to overcome obstacles, but also avoid the mutual interference between the inner and outer branch chains when the legs move. .
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More