Lie group filtering-based initial alignment method for strapdown inertial navigation
A strapdown inertial navigation and initial alignment technology, applied in the direction of measuring devices, instruments, etc., can solve problems such as deviations in attitude calculation, complex expressions, and calculation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
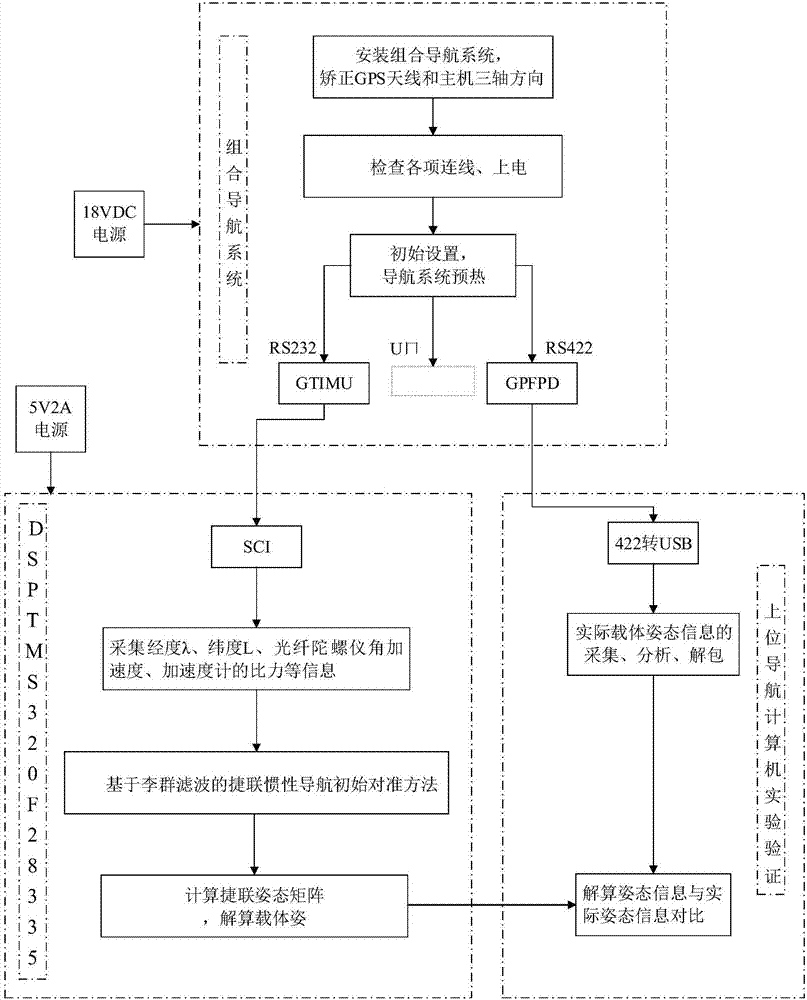
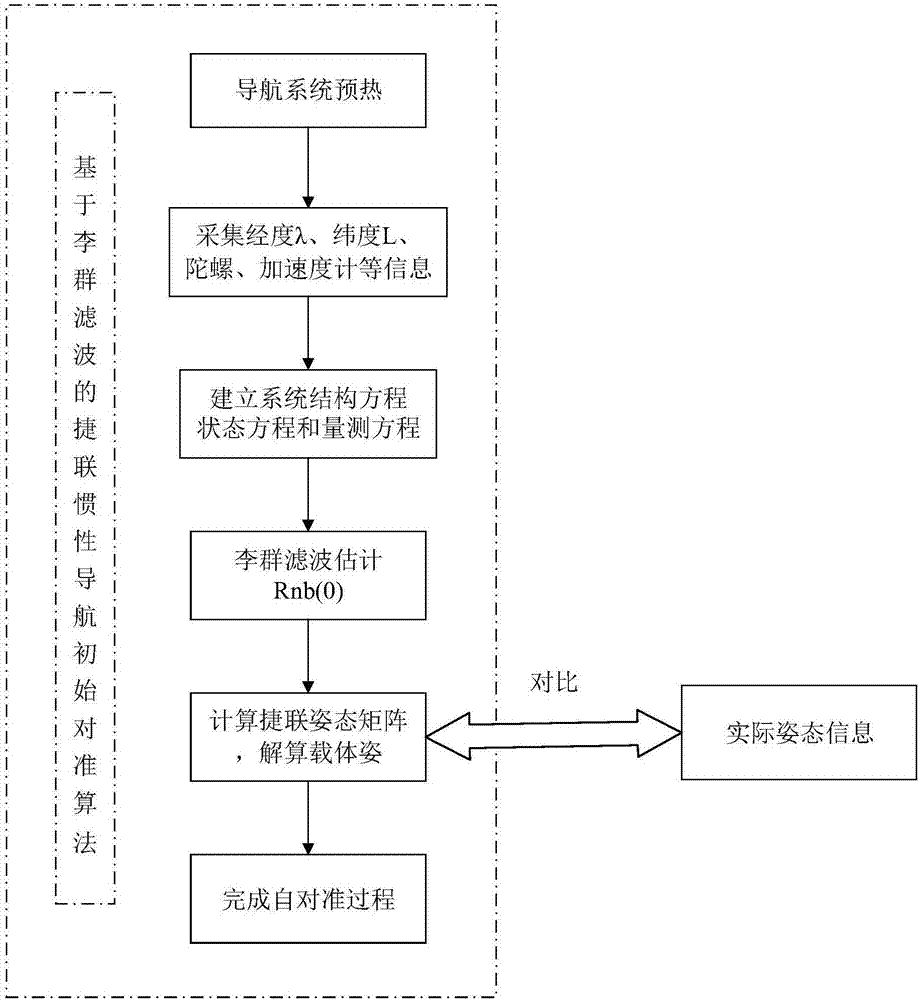
[0077] The present invention is a preliminary alignment design of a strapdown inertial navigation system based on Lie group filtering. The specific implementation steps of the present invention will be described in detail below in conjunction with the system flow chart of the present invention:
[0078] Step 1: In the system preparation stage, the navigation system is initialized, the basic information of the longitude λ and latitude L of the carrier's location is obtained, and the output angular velocity information of the gyroscope in the inertial measurement unit IMU is collected and accelerometer output information f b Wait;
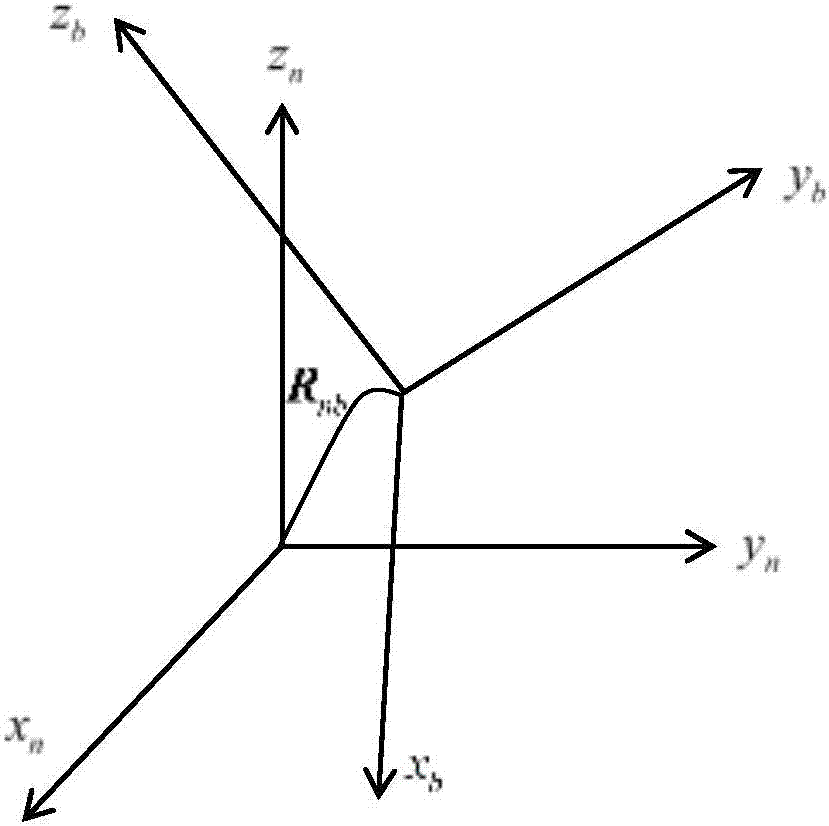
[0079] Step 2: Pass update calculation
[0080] because Usually changes slowly, the attitude matrix Approximately:
[0081]
[0082] in
[0083] Then get the attitude matrix for:
[0084]
[0085] Step 3: Calculate the angular velocity measured by the gyroscope
[0086] attitude matrix Approximately:
[0087]
[0088] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More