

Driving trajectory predicting system integrating kinematic model and behavioral cognition model
A kinematic model and trajectory prediction technology, which can be used in motor vehicles, transportation and packaging, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
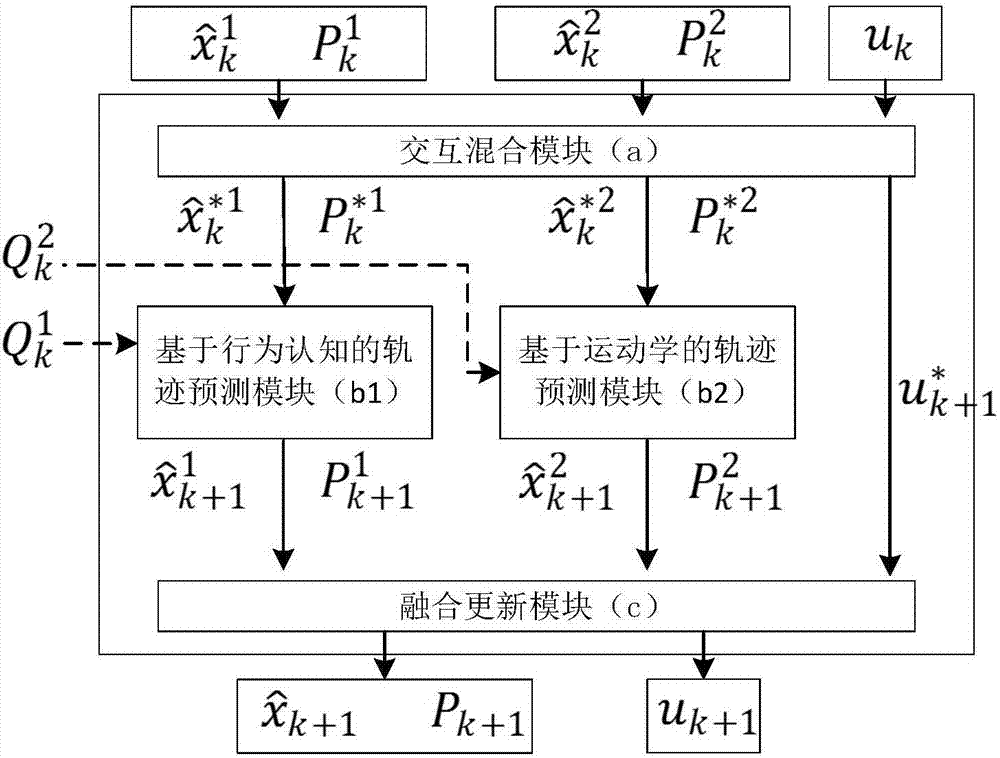
[0097] In this embodiment, the driving trajectory prediction system that integrates the kinematics model and the behavior cognition model is designed for intelligent driving vehicles. see figure 1 , which includes:
[0098] Interactive mixing module a, which interactively mixes and outputs the mixed results of the forecast results of each forecast module at the previous moment, and the mixed results are used for the forecast of the next moment;
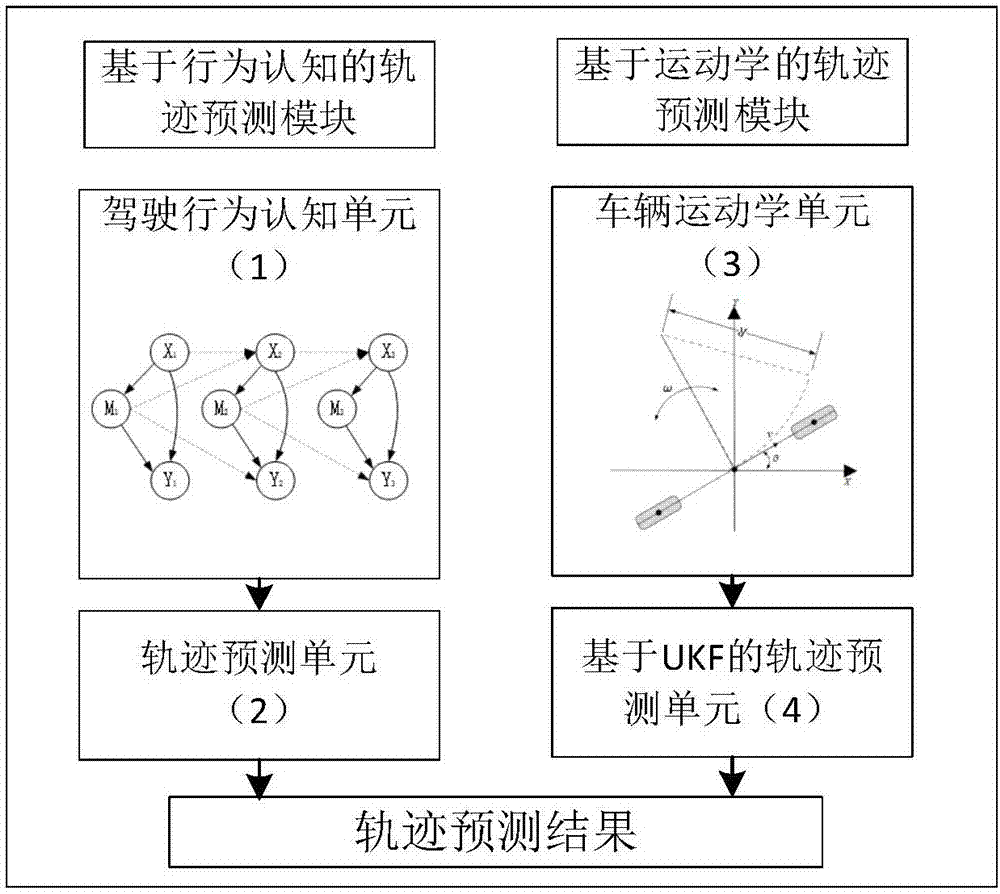
[0099] The prediction module includes a behavior cognition trajectory prediction module b1 based on behavior cognition and a motion trajectory prediction module b2 based on kinematics. The behavior cognition trajectory prediction module b1 and the motion trajectory prediction module b2 make predictions based on the mixed results output by the interactive mixing module a , output the prediction results of each prediction module, the prediction results include vehicle position and covariance matrix;
[0100] The fusion update module c f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More