

Method for extracting road center line by means of Visual Graph algorithm
A road and centerline technology, which is applied in the field of intelligent robot motion planning, can solve the problems of large complexity, difficult implementation, and large amount of calculation of the extended obstacle algorithm, and achieve the effect of easy understanding, reasonable road centerline, and simple understanding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
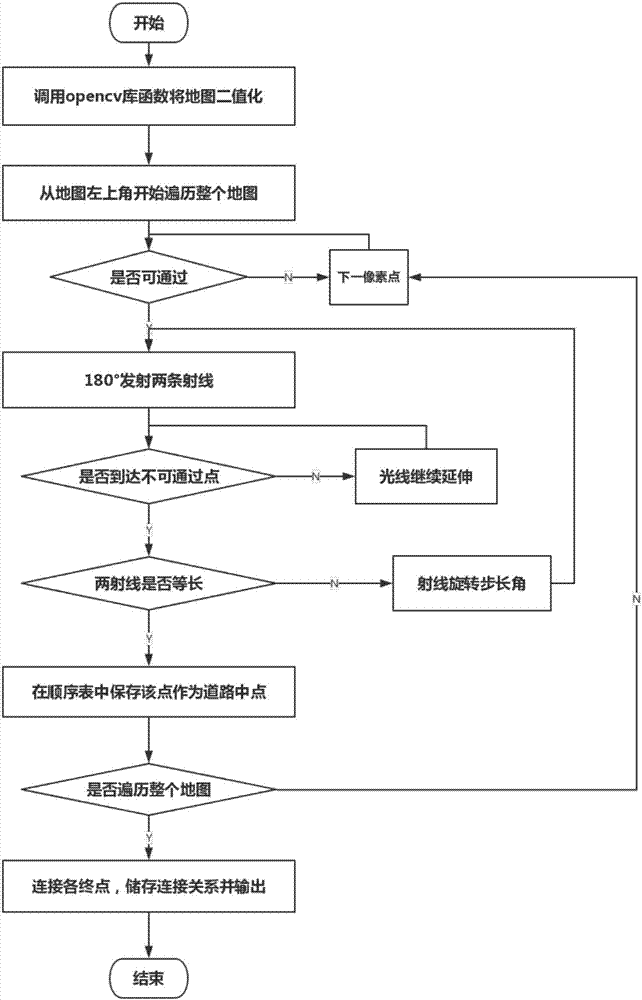
[0036] Such as figure 2 Shown, the specific implementation steps of the present invention are described in detail as follows:
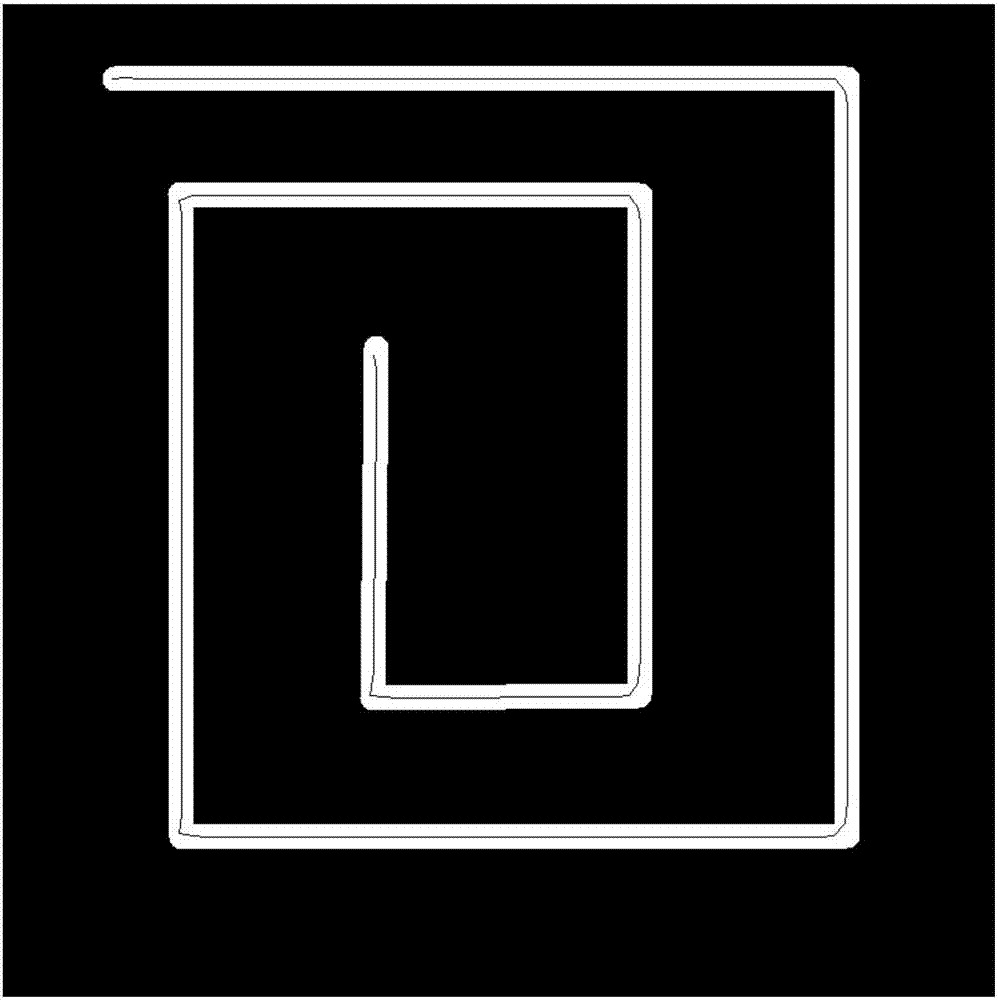
[0037] Step 1: Use the slam algorithm or other mapping algorithms to obtain the map of the road centerline to be generated, pass in the image in .pgm format, call the opencv library function imread to binarize it, and obtain the opencv matrix variable Mat, and then convert it Form a two-dimensional array, each element of the array represents a pixel point, its value is 0 or 1, 0 indicates that it can pass, 1 indicates that there is an obstacle, and the binarization process is completed;
[0038] Step 2: Traverse the entire map starting from the upper left corner of the map. If a certain pixel point is an impassable point, it will be skipped directly; if a certain pixel point is a passable point, light rays will be emitted from this point. Starting from this point, first emit two rays at an angle of 180° to each other in the horizontal direction, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More