

Finger posture judging method of mechanical arm and mechanical arm
A technology of manipulators and fingers, applied in the field of manipulators, can solve problems such as inability to accurately determine whether the manipulator is holding an object, misjudgment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
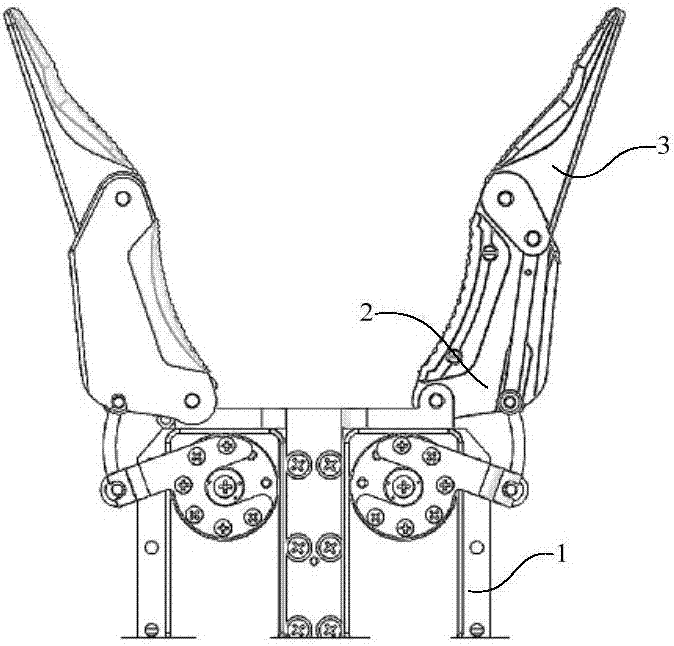
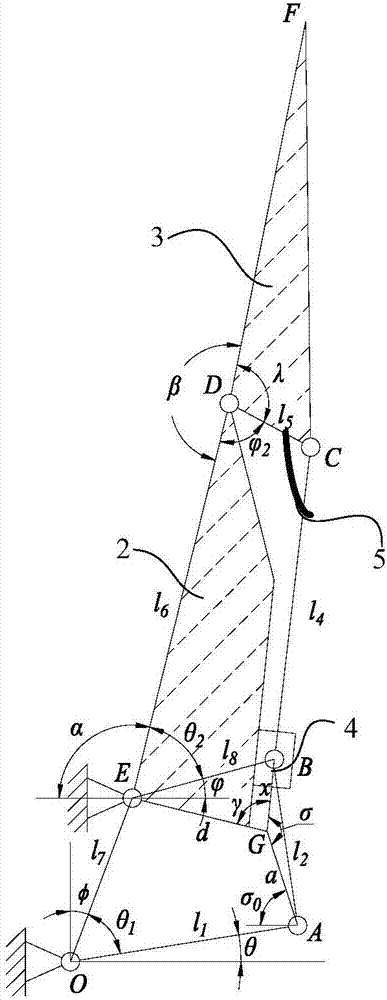
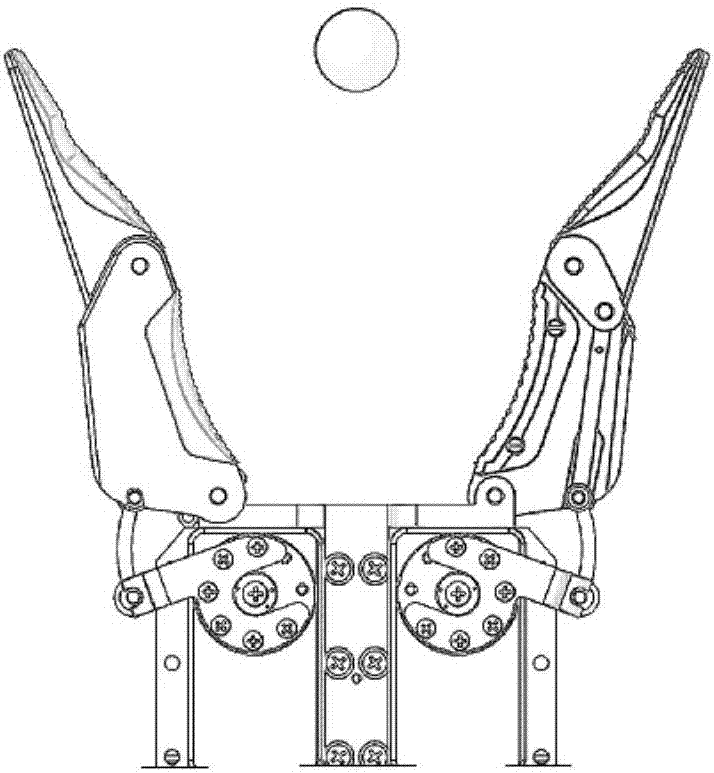
[0068] The method for judging the finger posture of the manipulator provided in this embodiment includes the following steps: if the driving torque reaches the load preset value, then obtain the major phalanx joint angle α and the small phalanx joint angle β of the manipulator, and calculate the result according to the following formula The fingertip distance x of the manipulator, if x≠0, it indicates that the manipulator has grasped the object;
[0069] x=l-2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More