

Flea beetle simulated hopping robot
A robot and jump armor technology, applied in the field of bionic robots, can solve the problems of limited ability to cross obstacles and difficulties in passing obstacles, etc., and achieve the effect of smooth bouncing movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further elaborated below in conjunction with accompanying drawing, but not limitation of the present invention:
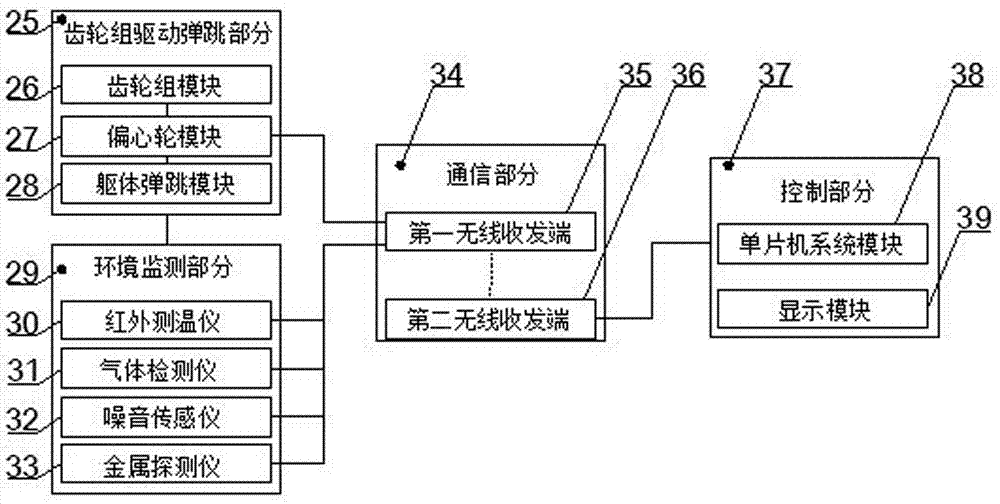
[0021] A bouncing robot imitating a jumping armor, comprising a gear set driving a bouncing part 25, an environment detection part 29, a communication 34 and a control part 37.
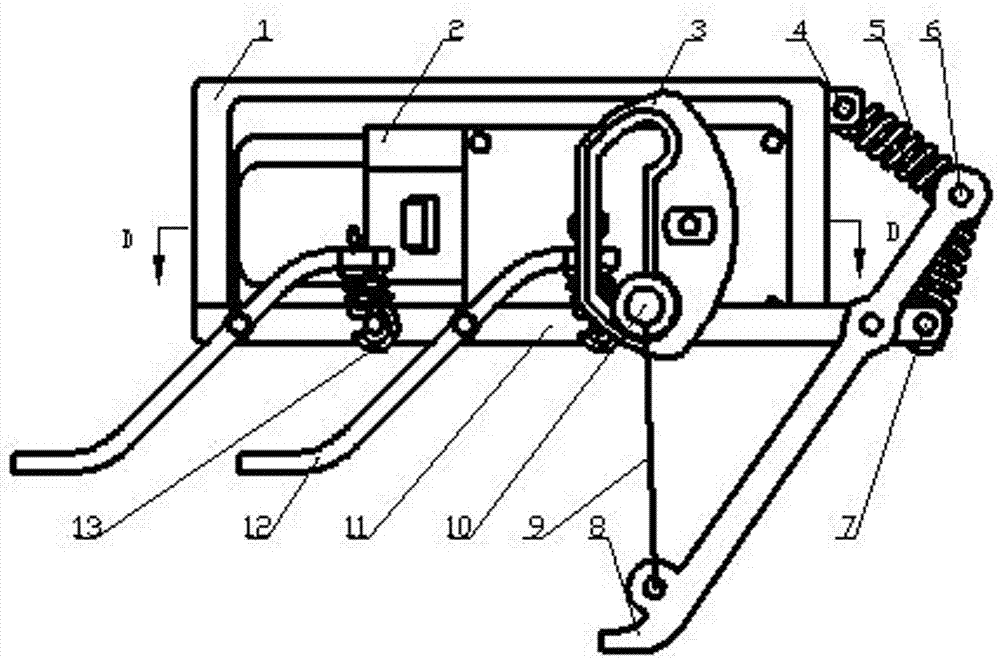
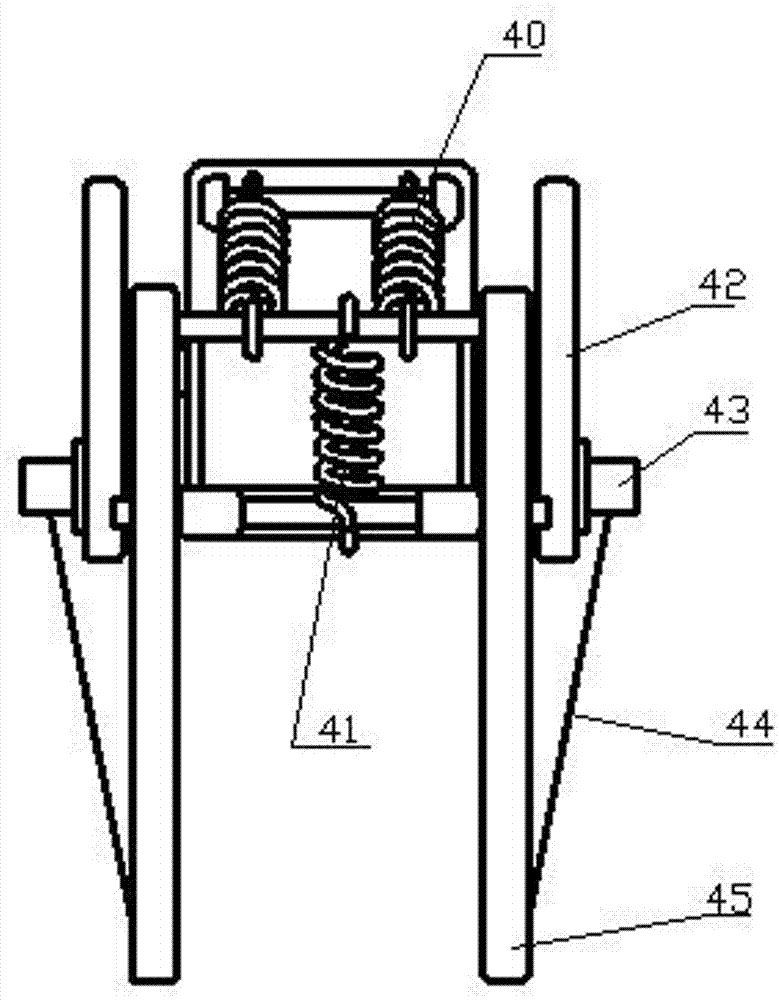
[0022] The gear set driving bouncing part 25 is composed of the gear set module 26, the eccentric wheel module 27 and the body bouncing module 28. Wherein the bottom of the gear set module 26 is connected with the body bounce module 28, the eccentric wheel module 27 is connected with the output flat shaft of the gear set module 26, and the body bounce module 28 is connected with the eccentric wheel module 27.
[0023] Described gear set module 26 is made up of motor 14, left casing 16, right flat shaft 22, driven motor gear 17, driven shaft 18, output shaft 21, right casing 2, first transmission gear 19, second transmission gear 24, driving motor gear ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More