

Vehicle traveling stability controlling method and system based on extension sliding mode wire controlling
A technology for stability control and vehicle driving. It is applied to vehicle components, automatic steering control components, steering mechanisms, etc., and can solve problems such as large rotation or even reaching the limit position.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
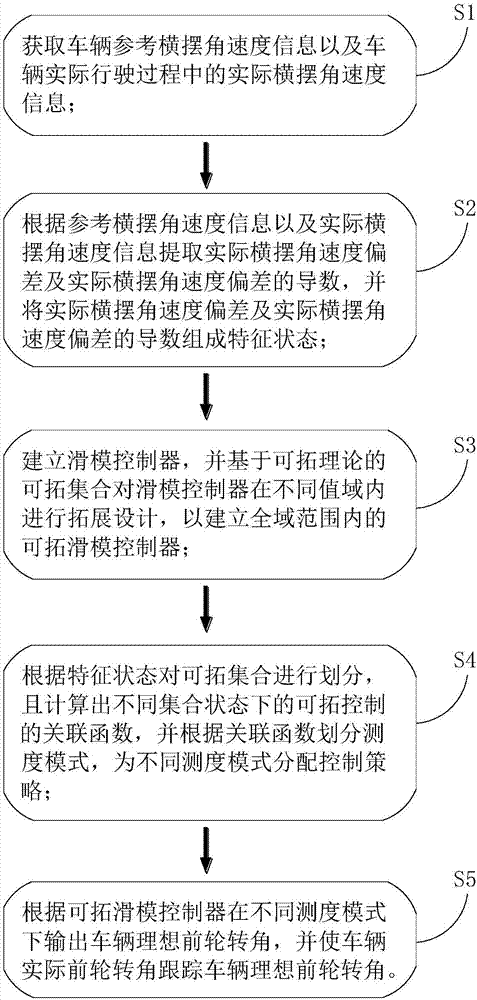
[0104] refer to figure 1 , Figure 3-Figure 5 , the present invention proposes a control method based on an extension sliding mode control-by-wire vehicle, comprising the following steps:
[0105] S1. Obtain the reference yaw rate information of the vehicle and the actual yaw rate information during the actual driving process of the vehicle;
[0106] Step S1 specifically includes:
[0107] Obtain vehicle reference yaw rate information according to the vehicle two-degree-of-freedom reference model;
[0108] The car two-degree-of-freedom reference model is as follows:
[0109]
[0110] Among them, β is the side slip angle of the center of mass, ω r is the yaw rate, δ f is the front wheel angle, V is the speed of the vehicle, m is the mass of the vehicle, I z is the moment of inertia of the vehicle around the z-axis, l f is the distance from the center of mass to the front axle of the vehicle, l r is the distance from the center of mass to the rear axle of the vehicle,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More