

Super-size flexible spacecraft dispersion cooperative control method
A flexible spacecraft, collaborative control technology, applied in vehicle position/route/altitude control, attitude control, non-electric variable control and other directions, can solve problems such as weak damping, spacecraft attitude disturbance, spacecraft instability, etc., to achieve High pointing accuracy and stability, the effect of improving system performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
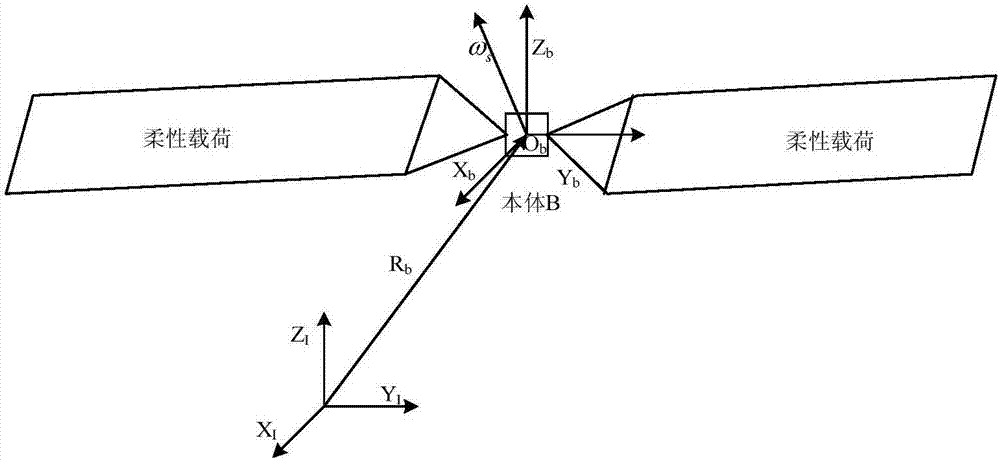
[0032] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
[0033] Such as figure 1 Shown is a schematic structural diagram of a super-large-scale flexible spacecraft of the present invention. The spacecraft body B shown in the figure is combined with a flexible load to form the spacecraft system. This type of spacecraft operates in a complex space environment. Due to the The influence of external interference and internal rigid-flexible coupling may cause the flexible attachment to oscillate, which will bring many uncertain factors to the system, and will threaten the stability of the star in severe cases.
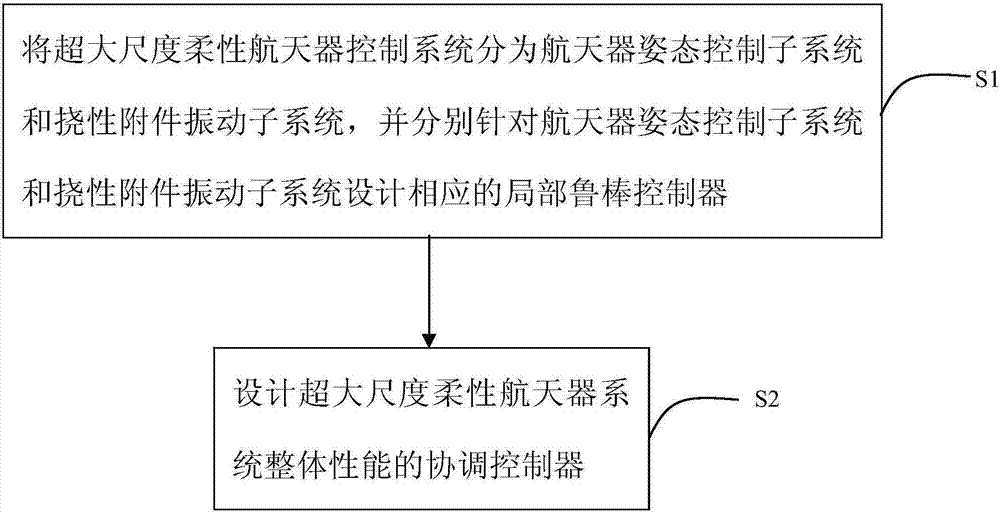
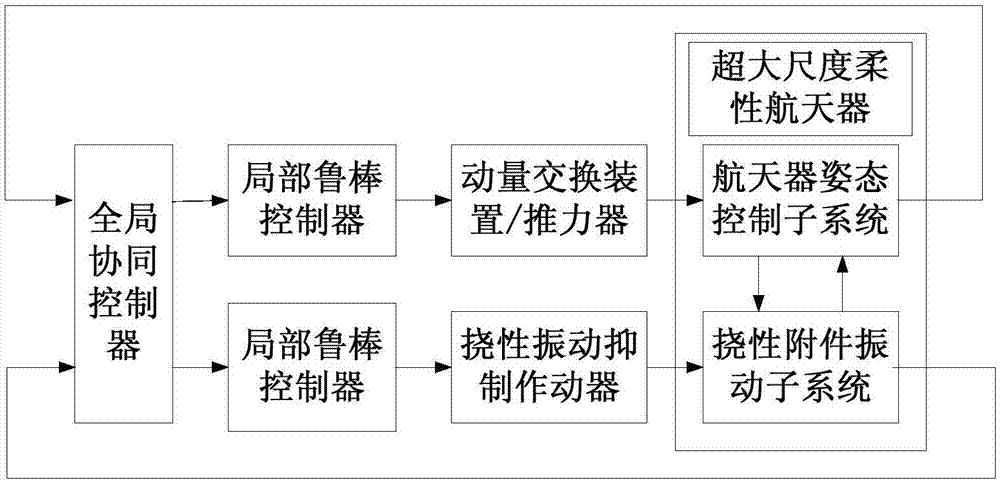
[0034] In order to solve the above problems, the present invention proposes a decentralized and cooperative control method for ultra-large-scale flexible spacecraft, which is used to realize high stability and vibration suppression control of ultra-large-scale flexib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More