

Automatic tennis ball picking robot with machine vision
A technology of machine vision and robotics, applied in the field of robotics, can solve the problems of heavy workload, manpower consumption, and high labor costs for ball picking personnel, and achieve the effect of flexible picking and releasing methods, increasing the height of dribbling, and flexible and convenient picking and placing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below with reference to the accompanying drawings and embodiments, and the mode of the present invention includes but not limited to the following embodiments.
[0030] This embodiment is mainly to solve the current problem of low efficiency in picking up tennis balls, high labor costs and lack of existing ball picking tools, and provides a tennis automatic ball picking robot with machine vision. The robot is easy to use and simple to manufacture. , low cost, high degree of intelligence, and high ball picking efficiency.
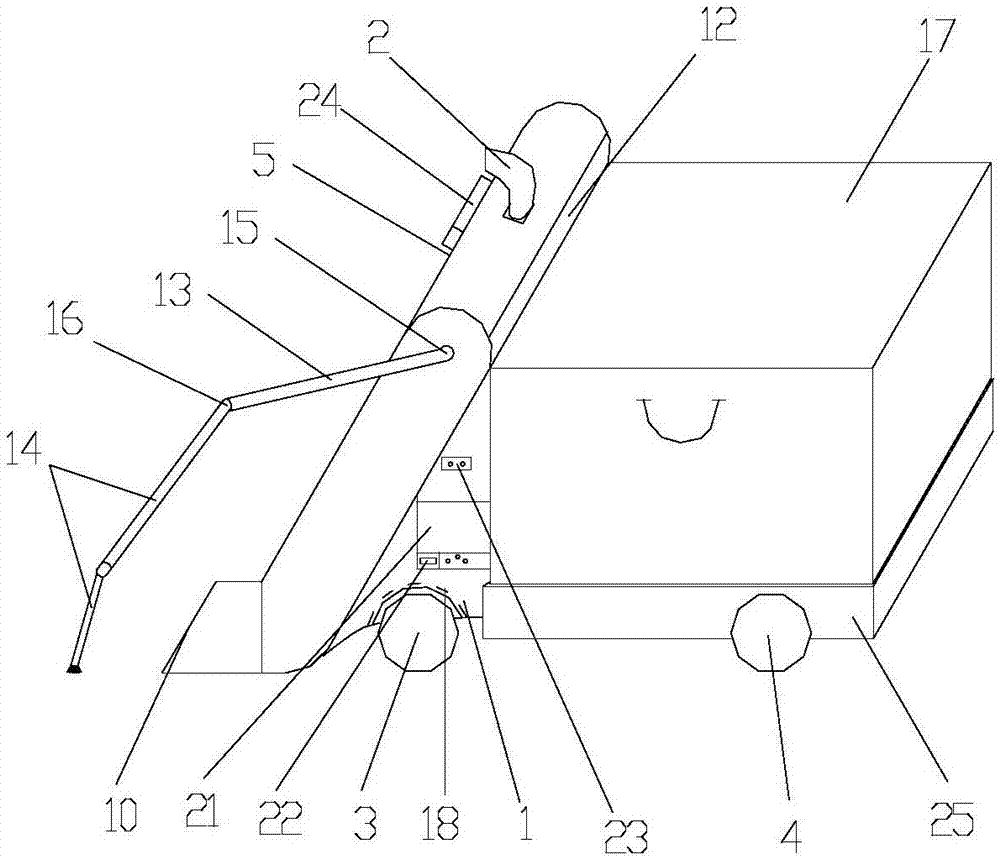
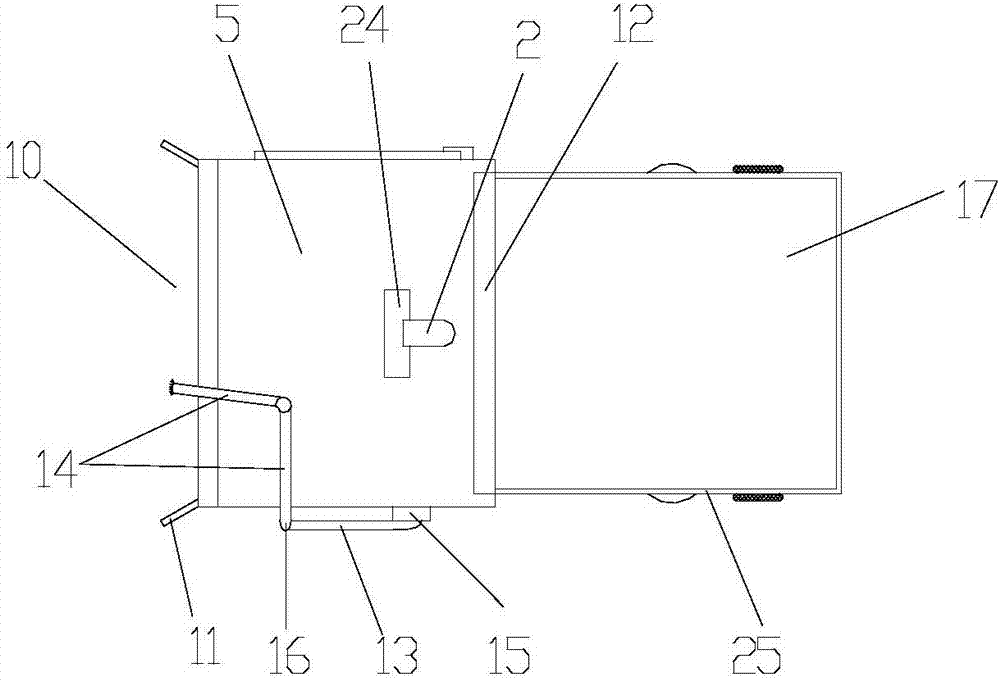
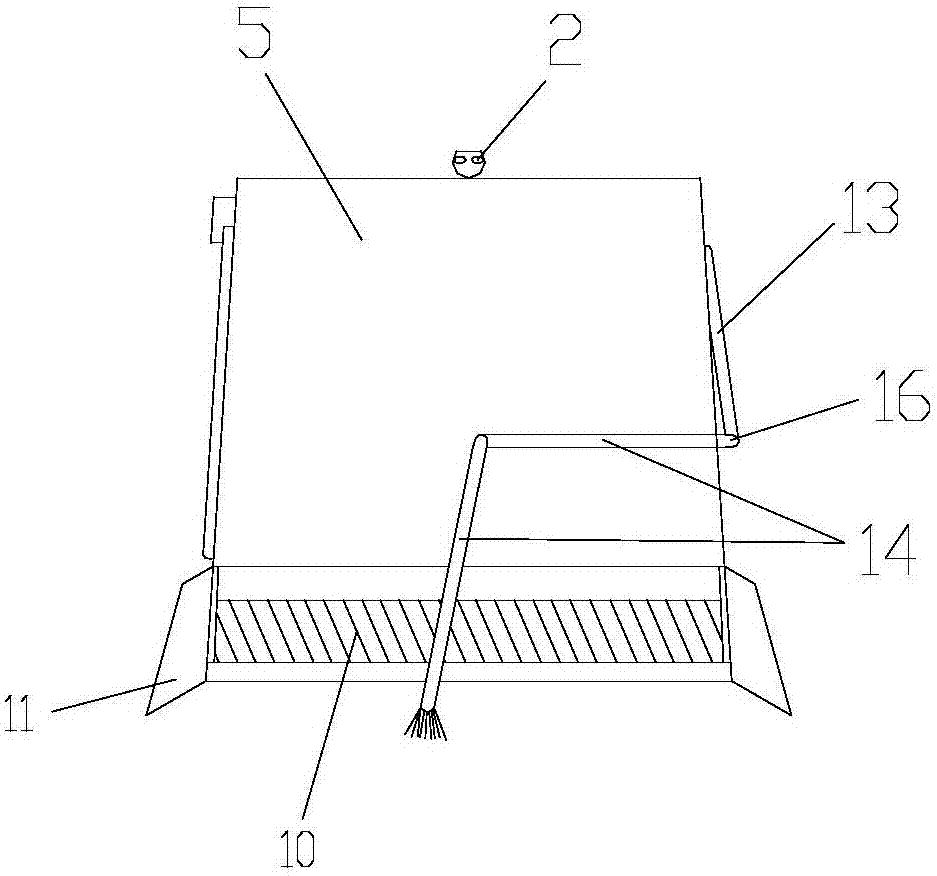
[0031] Such as Figure 1 ~ Figure 4 As shown, a tennis ball picking robot with machine vision automatically includes a ball picking device, an auxiliary ball picking mechanical arm, a control system and a ball collecting box.
[0032] The ball picking device includes a housing 5 and a ball picking structure arranged in the housing.
[0033] Such as figure 1 and Figure 4 As shown, the overall ball pi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More