

Six-dimensional force sensor capable of sensing contact force and traction force
A six-dimensional force sensor and traction force technology, applied in the field of sensors, can solve the problem that the magnitude and direction of the robot end force cannot be accurately sensed at the same time, and the interaction force between the robot end effector and the environment can be achieved, and the elastic body coupling phenomenon is not obvious. The effect of promoting research progress and expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
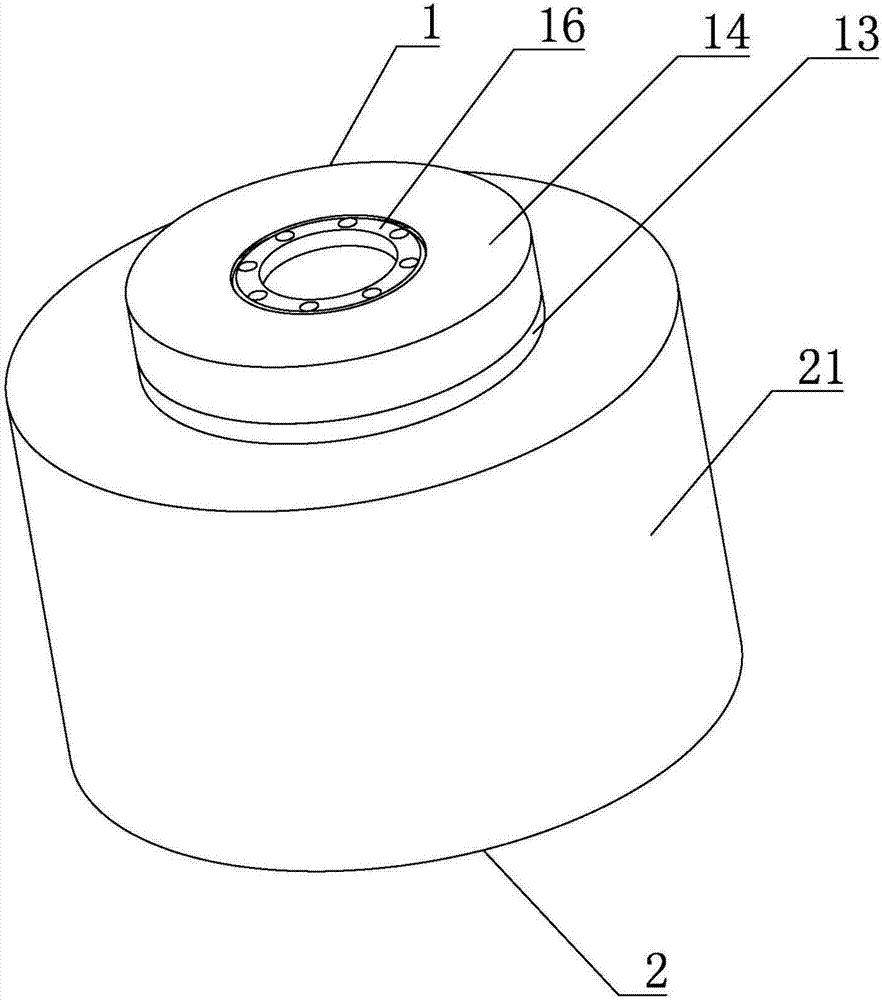
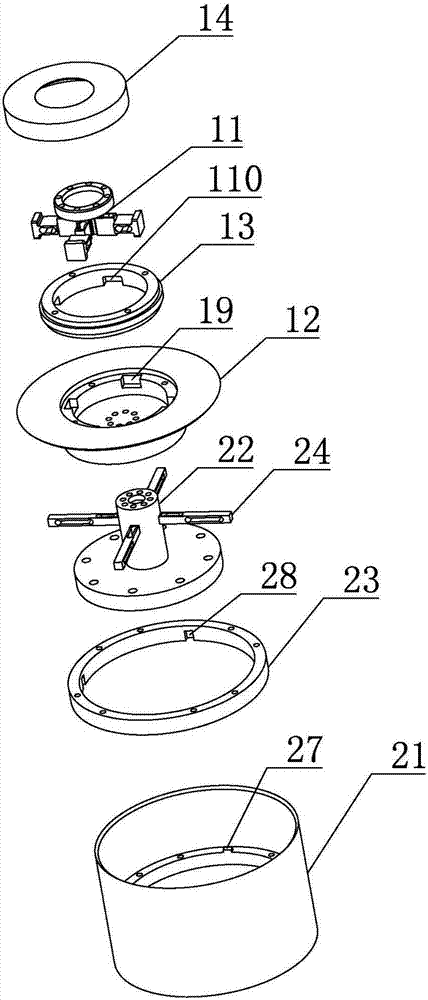
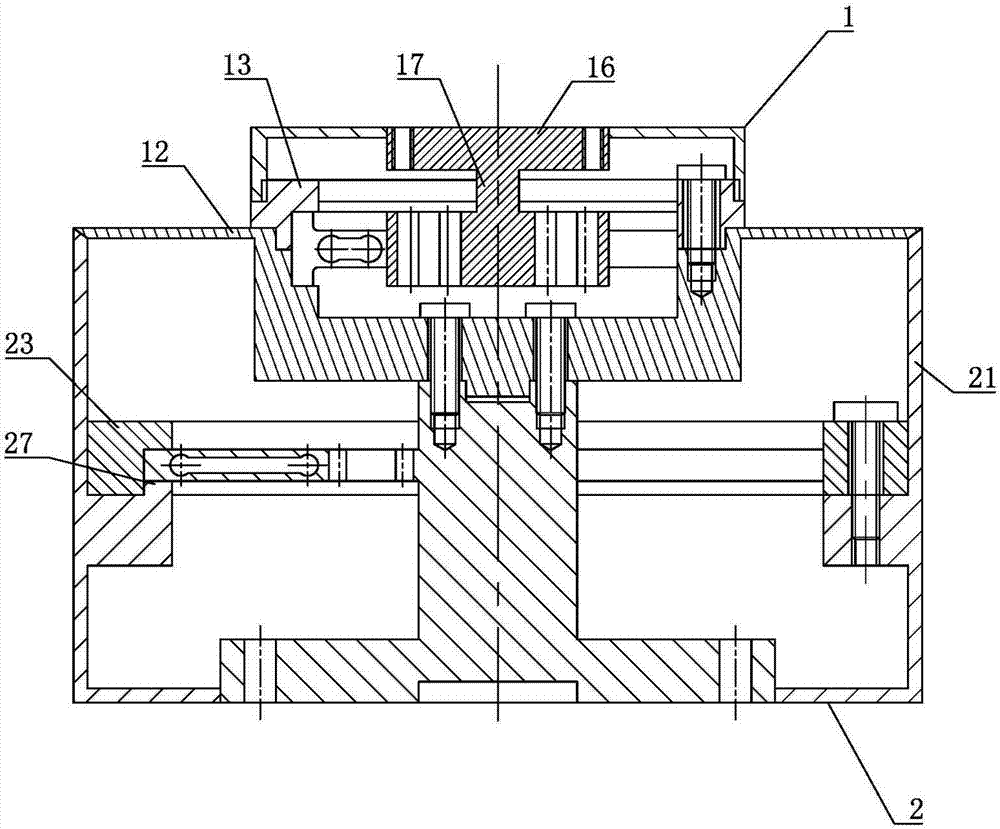
[0028] Reference Figure 1~Figure 10 , A six-dimensional force sensor capable of sensing contact force and traction force, including contact force sensor 1 and traction force sensor 2, in which,
[0029] The contact force sensor 1 includes a first elastic body 11, a fixed flange 12, a first fixing ring 13 and a fixed housing 14. The first elastic body 11 includes a contact force detection cross beam 15 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More