Method for avoiding unmanned ship collision based on improved ant colony algorithm
An ant colony algorithm and technology of unmanned boats, applied in the field of collision avoidance of unmanned boats, to achieve quality improvement, reduce workload, and improve intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings.
[0048] The purpose of the present invention is achieved by the following steps:
[0049] 1. Acquisition of obstacle position and acquisition of position and attitude of unmanned vehicle
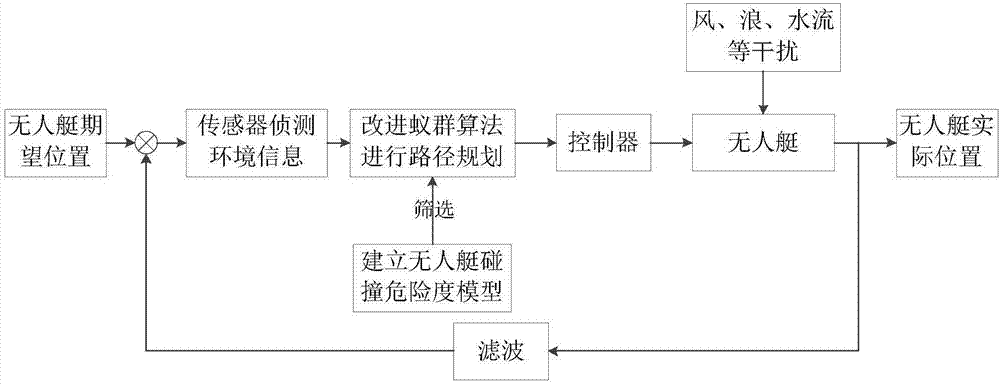
[0050] The measurement system on the unmanned boat is mainly composed of two parts: the position reference system and the sensor reference system, which respectively measure the position and attitude of the unmanned boat and the position of obstacles during navigation. Taking into account the inconsistency of different sensors in time and pace, as well as measurement errors and various uncertain factors. The data from different sensors are filtered, fused, and space-time aligned to obtain more accurate position and attitude information.
[0051] 2. Determine when the unmanned vehicle takes collision avoidance measures
[0052] According to the "1972 International Regulations for Pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com