

Unmanned vehicle intelligent obstacle avoidance method and system
A technology for unmanned vehicles and obstacle avoidance, which is applied in control/regulation systems, motor vehicles, vehicle position/route/height control, etc., and can solve the problems of slow convergence of neural networks, constraints on reinforcement learning applications, easy to fall into local minimum, etc. problems, to achieve the effect of strong adaptability and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] LMS151 is a single-line laser radar commonly used in unmanned vehicles. The main features of this radar are: large-scale monitoring, a maximum scanning angle of 270°, and an angular resolution of 0.5°; the longest scanning distance is 50 meters, 10 Under the premise of % reflectivity, the scanning distance can reach 18 meters; the scanning frequency is 50Hz; small size, light weight, multi-echo technology, and self-checking function.
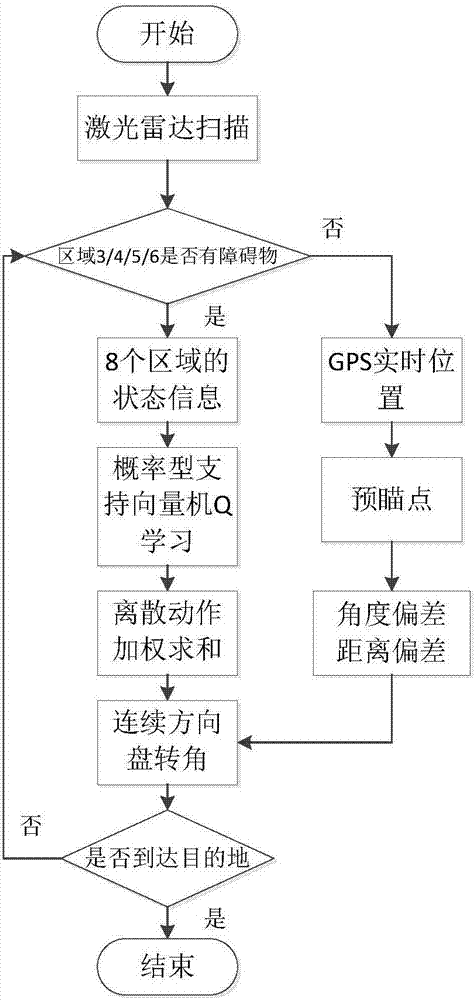
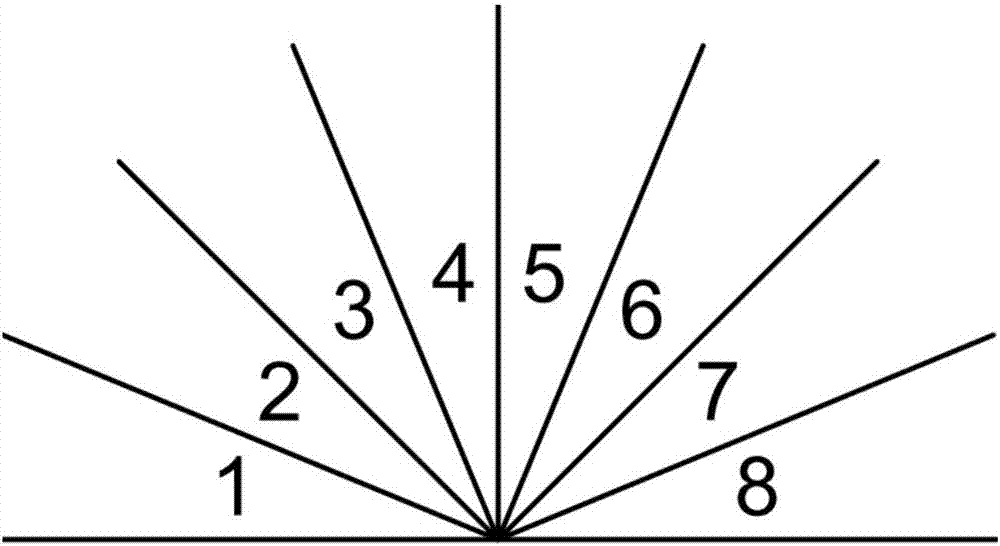
[0034] Install the laser radar at the position of the license plate directly in front of the vehicle, set the scanning angle of the single-line laser radar to 180°, and divide the scanning area into 8 parts, each with an angle of 22.5°, and label them as area 1, area 2... area 8, such as figure 2 shown.
[0035] Judging the state based on the data scanned by the lidar, when obstacles are detected in areas 3, 4, 5, and 6, the unmanned vehicle chooses obstacle avoidance behavior, otherwise it is considered that there are no obstacles in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More