

Riding type experience system and riding robots
A technology of experience system and robot, which is applied in the field of riding experience system and riding robot, which can solve the problems of lack of fun of man-machine integration, single experience, and failure of robots to be protected in time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
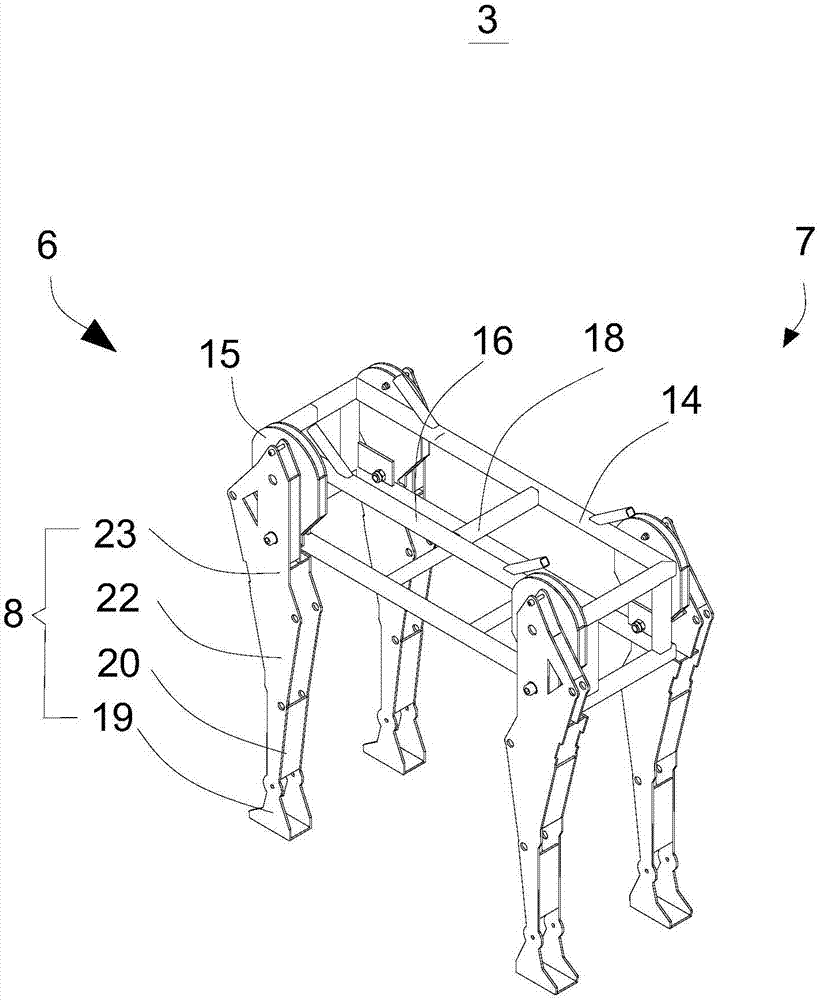
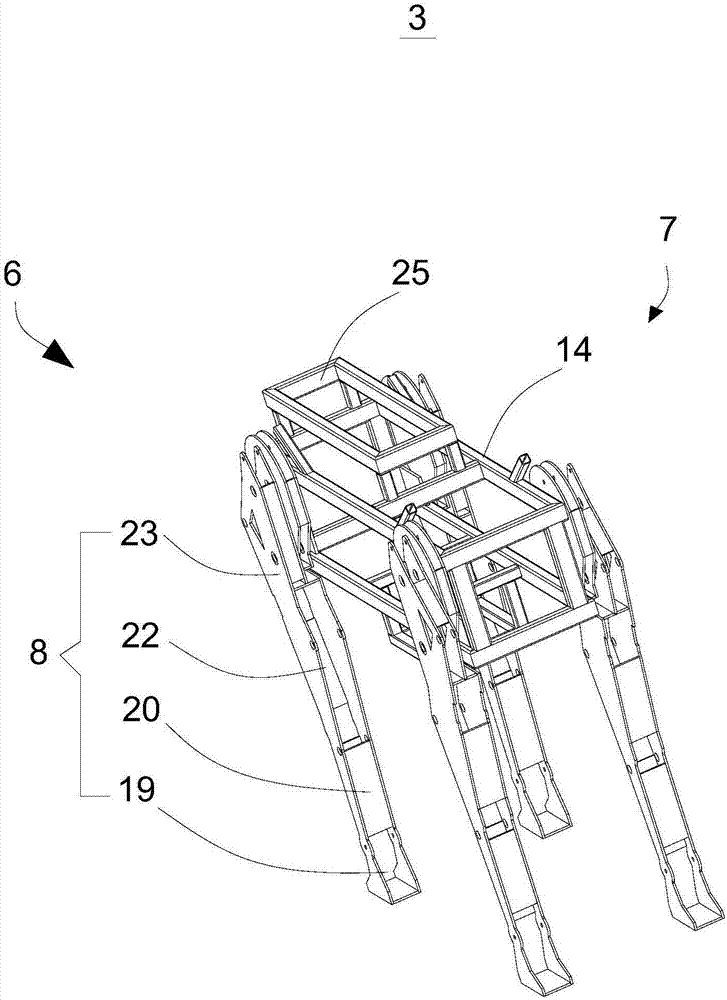
[0041] Please refer to figure 1 , figure 2 as well as Figure 5 , this embodiment provides a riding robot 3, which can be used to carry tourists, including a walking mechanism 6 and a body frame 7 connected in sequence from bottom to top.
[0042] Wherein, the walking mechanism 6 includes four mechanical legs 8 arranged at intervals, and the mechanical legs 8 include a leg 19 , a calf support 20 , a thigh support 22 and a hip joint support 23 articulated sequentially from bottom to top. Wherein, one end of leg 19 is hinged with one end of calf support 20 , the other end of calf support 20 is hinged with one end of thigh support 22 , and the other end of thigh support 22 is hinged with one end of hip joint support 23 .
[0043] The body framework 7 comprises a body frame 14 and a fixed connection assembly 15; the body frame 14 is a frame structure, and a longitudinal support 16 and a transverse support 18 are installed on the frame structure, and the longitudinal support 16 ...
Embodiment 2
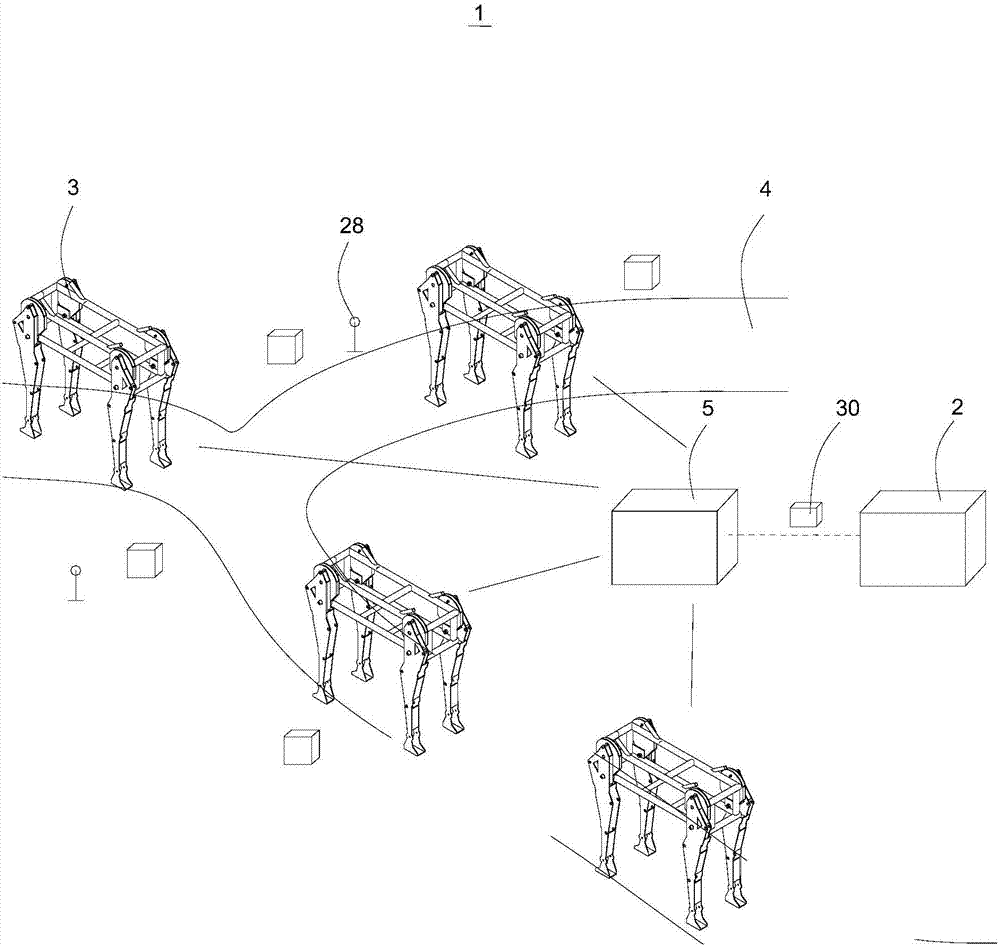
[0048] Please refer to image 3 , Figure 4 as well as Figure 5 , with reference to figure 1 , figure 2 as well as Image 6 , this embodiment provides a riding experience system 1 , the riding experience system 1 includes a control console 2 , the riding robot 3 in the first embodiment, a motion track 4 and a wireless communication control system 5 .
[0049] The control console 2 communicates with the wireless communication control system 5, and the wireless communication control system 5 includes a controller 10, a walking drive mechanism 11, a face control mechanism 12, a path control mechanism 13, a manual control mechanism 32 and an emergency stop button (not shown in the figure). marked).
[0050] The controller 10 adopts a motion controller, embedded in the body frame 7 of the riding robot 3, and the program is stored in the motion controller and controls the motion state of the riding robot 3 through the EtherCAT communication bus.
[0051] The walking drive me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More