

Spring type portable mechanical arm for helping disabled people
A manipulator and spring-type technology, which is applied in the field of spring-type portable handicapped manipulators, can solve the problems of user burden, increased use cost, heavy motor quality, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
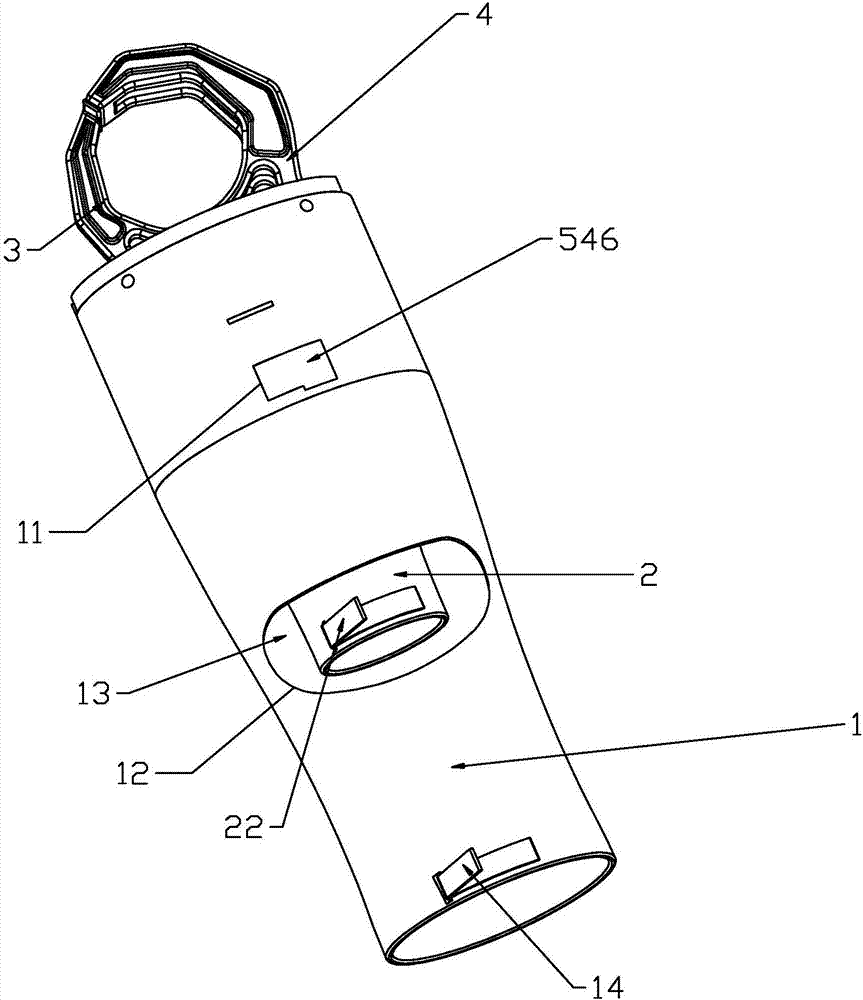
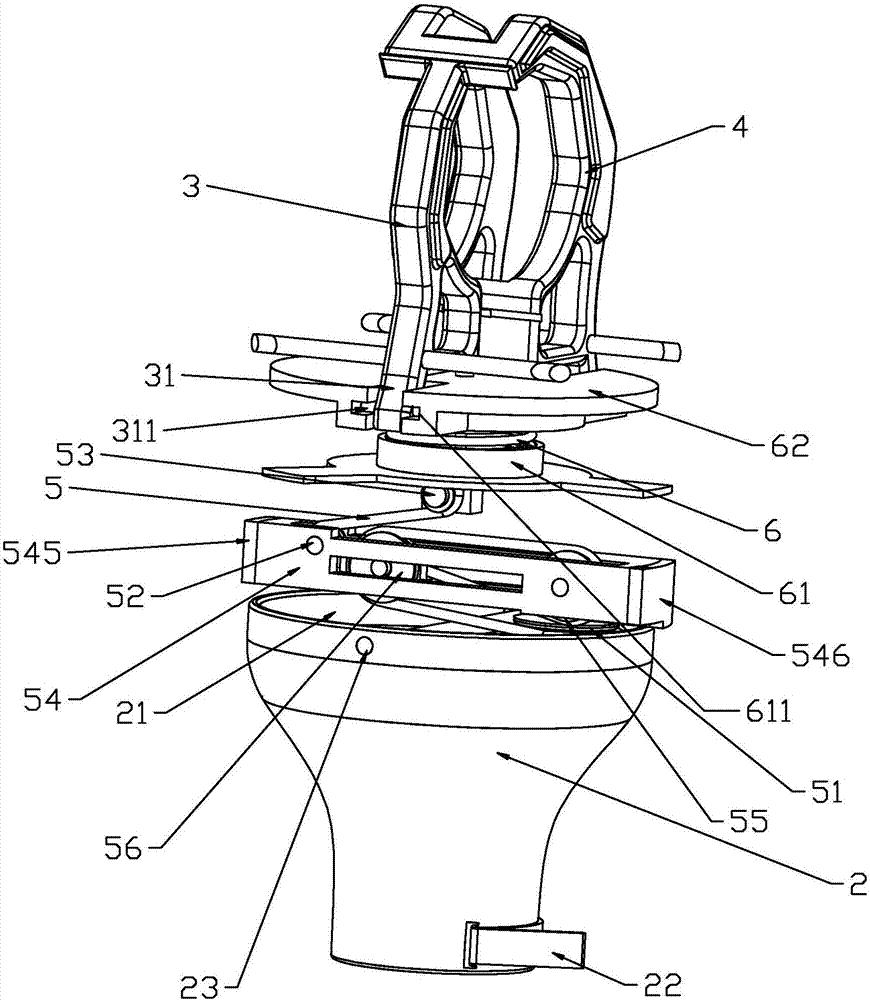
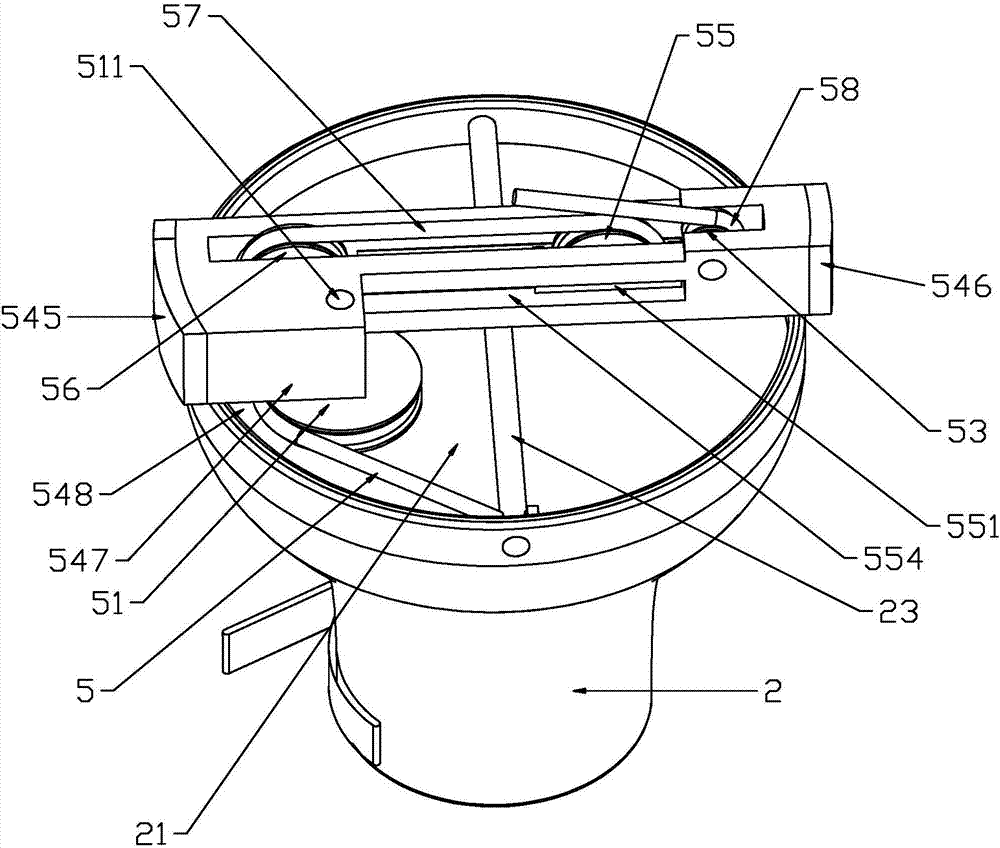
[0029] Such as figure 1 — Figure 5 As shown, the present invention discloses a spring-type portable handicap manipulator, including a mounting part and a clamping claw. The fixed sleeve 1 is installed on the rear end of the forearm. The fixed sleeve 1 is cylindrical and surrounds the forearm. The driving device includes a movable sleeve 2 and a linkage mechanism. The movable sleeve 2 is rotated and installed in the fixed sleeve 1 and installed on the front end of the forearm. The clamping claw includes The claws arranged in pairs, each claw is rotatably arranged on the fixed sleeve 1, the claw is provided with a linkage part 31 for adjusting the rotation position of the claw, the linkage mechanism is arranged between the movable sleeve 2 and the linkage part 31, and the movable sleeve 2 is on the forearm When the front end is driven to rotate relative to the fixed sleeve 1, the linkage mechanism separates the claws; when the movable sleeve 2 does not exert force on the front...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More