

Four-legged wheeled mobile robot
A mobile robot and caster-type technology, applied in the field of mobile robots, can solve problems such as slow moving speed and inability to adapt to the complexity and diversity of the working environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to further understand the invention content, characteristics and effects of the present invention, the following embodiments are listed below, and detailed descriptions are as follows in conjunction with the accompanying drawings.
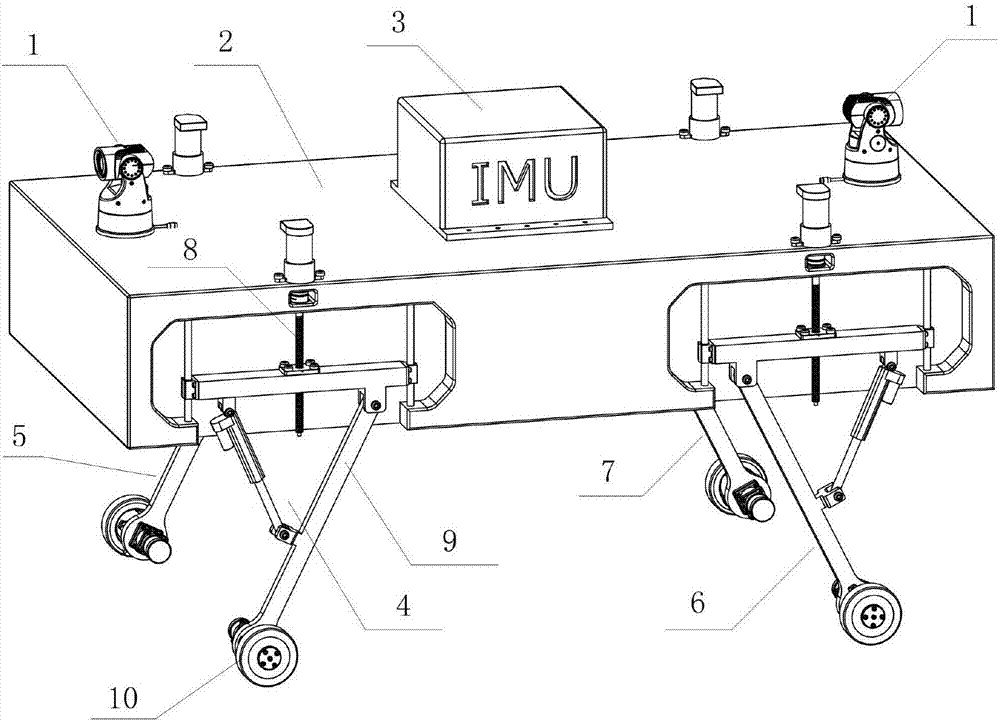
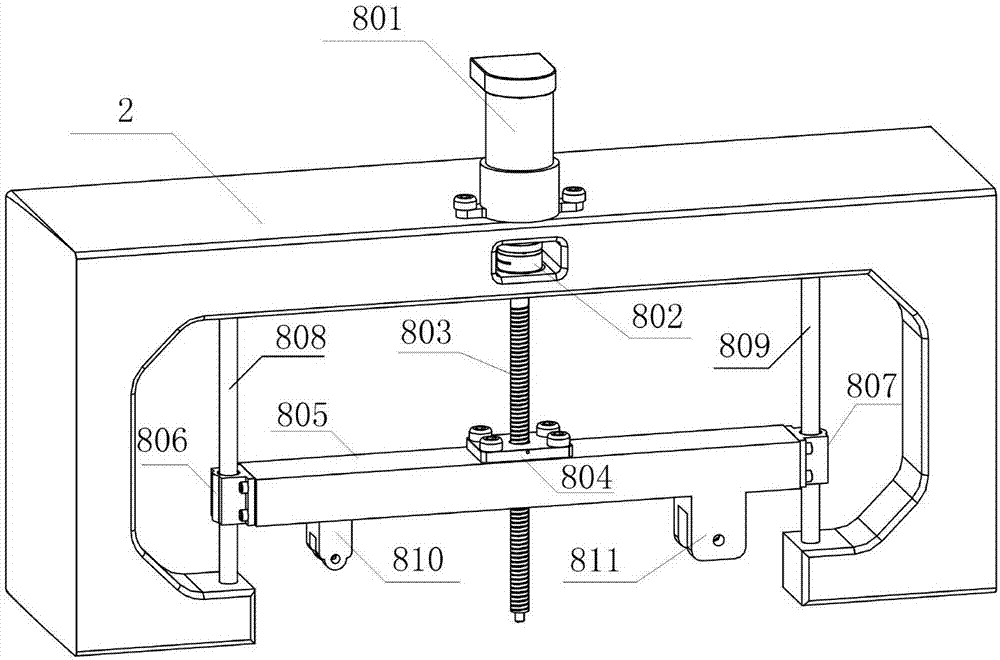
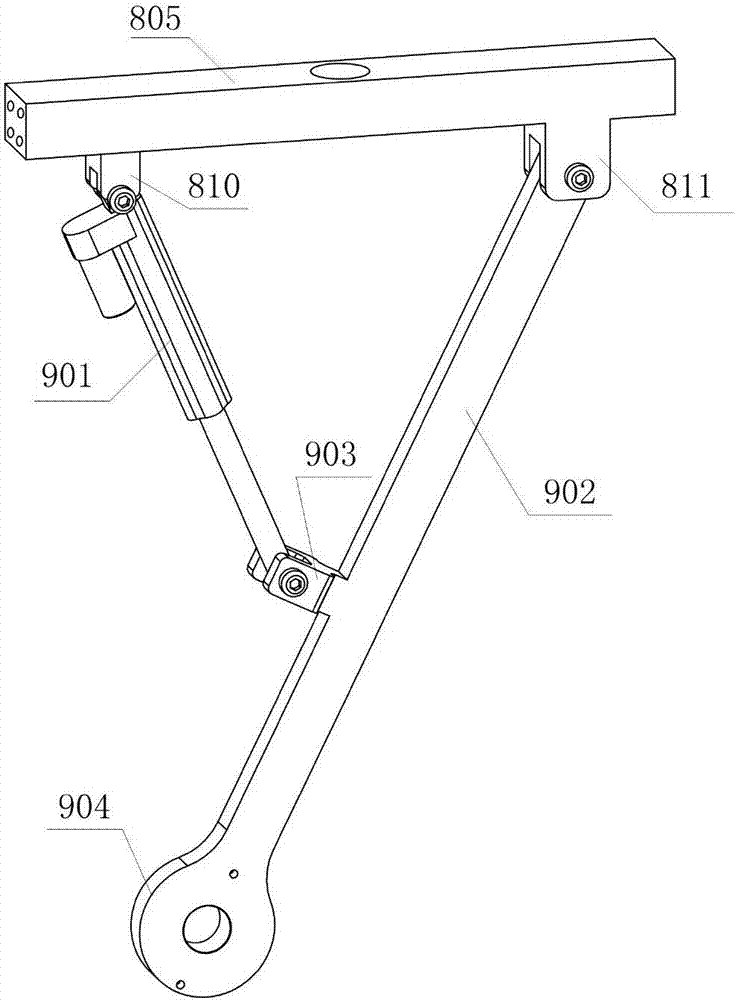
[0015] Combine below Figure 1-4 The structure of a quadruped wheeled mobile robot invented is described in detail. A four-legged wheeled mobile robot is composed of two omnidirectional high-definition cameras 1, a vehicle body frame 2, an inertial measurement device 3 and four outriggers 4-7, and the two omnidirectional high-definition cameras 1 are fixed on the vehicle The front and rear ends of the upper surface of the body frame can be used to identify the surrounding environment and landforms. The inertial measurement device 3 is fixed at the center of the upper surface of the body frame and can be used to measure the pose of the robot during movement. The four The outriggers are installed symmetrically on both sides of the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More