

Underwater intelligent robot radar obstacle avoidance system
A technology of intelligent robot and robot body, applied in general control systems, control/regulation systems, radio wave measurement systems, etc., can solve the problem of not considering the influence of the underwater robot's obstacle avoidance ability, and cannot truly reflect the dynamic changes of the underwater robot. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
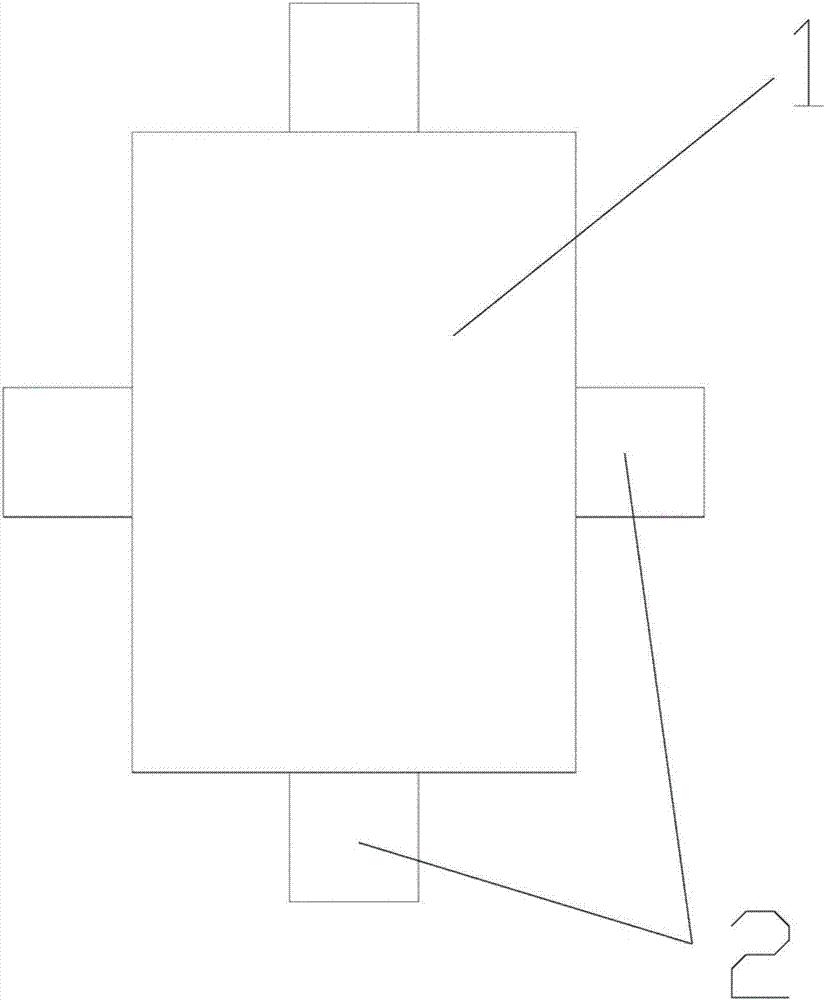
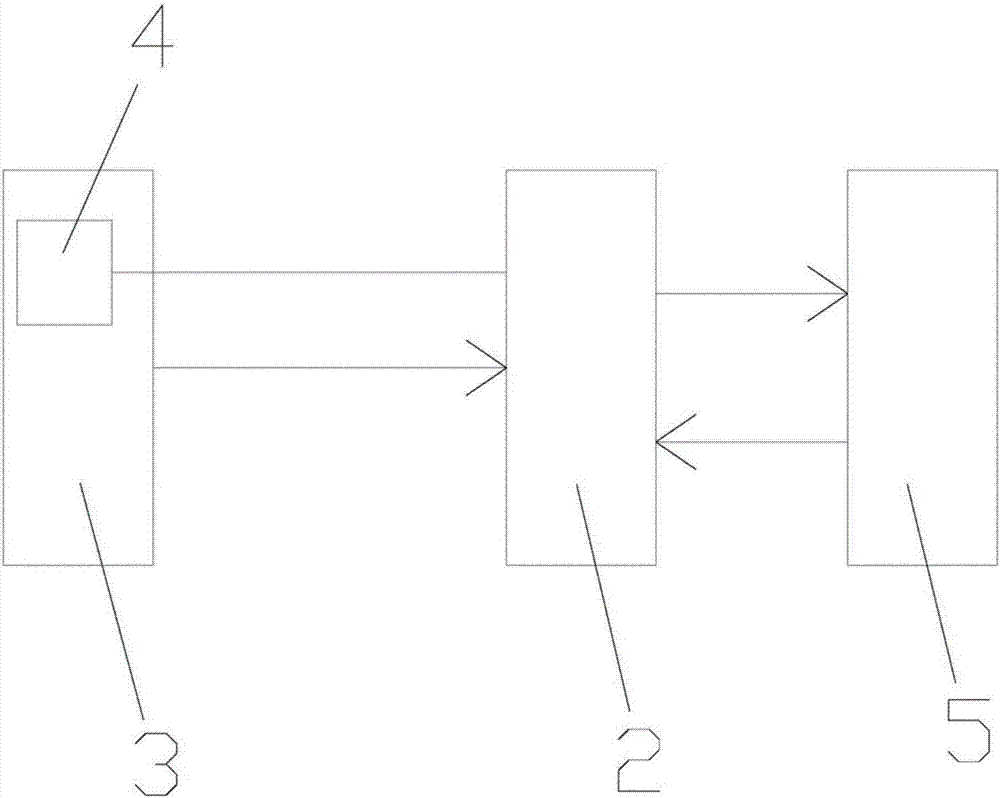
[0017] See attached Figure 1-2 As shown, the radar obstacle avoidance system of a kind of underwater intelligent robot of the present embodiment comprises a robot body 1, and a radar transceiver 2 is installed on the top surface, the bottom surface, the left side and the right side of the robot body 1, and the robot The body 1 is provided with a single-chip microcomputer 3 and a peripheral circuit connected with the single-chip microcomputer 3. The single-chip microcomputer 3 is provided with a timer 4. The single-chip microcomputer 3 is an 8-bit single-chip microcomputer. Its model is STM8S105, and its main frequency can reach 24MHZ. The single-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More