

Charging method and charging system of mobile robot
A mobile robot and charging method technology, which is applied in the field of mobile robots, can solve the problems of long time to find a charging seat, deviation of laser scanning code alignment, etc., and achieve the effect of rapid recharging and high alignment accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
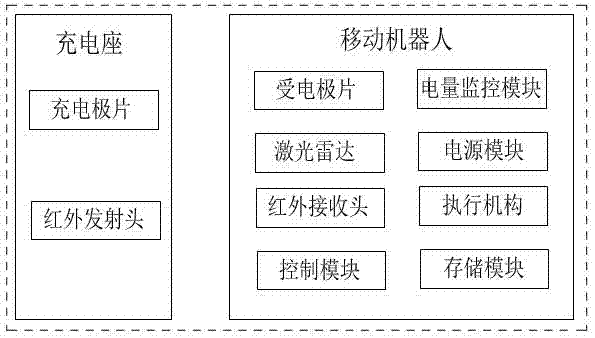
[0027] Such as figure 2 As shown, the charging system of the mobile robot of the present invention includes a charging base and a mobile robot, wherein the charging base includes a charging pole piece and an infrared emitting head, and the mobile robot includes a receiving electrode piece, a laser radar, an infrared receiving head, a control module, a storage module, Power module, power monitoring module and actuator. The receiving electrode sheet is used to contact the charging electrode sheet of the charging stand for power supply, the lidar is used for real-time positioning and map creation (ie SLAM), and the infrared receiving head is used to receive the infrared emission from the charging stand signal (the infrared receiving head in this embodiment includes two receiving heads, left and right, and the infrared emitting head of the charging stand also includes two infrared emitting heads, left and right), the control module is used to The feedback information sends instr...
Embodiment 2
[0038] Such as image 3 As shown, the charging system of the mobile robot of the present invention includes a charging base and a mobile robot, wherein the charging base includes a charging pole piece, an infrared emitting head and a characteristic mark (including a bar code or a two-dimensional code), and the mobile robot includes a receiving electrode piece, a laser radar , an infrared receiving head, a control module, a storage module, a power supply module, a power monitoring module and an actuator. The receiving electrode sheet is used to contact the charging electrode sheet of the charging stand for power supply, the lidar is used for real-time positioning and map creation (ie SLAM) and scanning the characteristic marks of the charging stand, and the infrared receiving head is used to receive The signal sent by the infrared transmitter of the charging stand, the control module is used to send instructions to the actuator according to the information fed back by the laser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More