

Non-coupling six-dimensional force sensor with binocular structure
A six-dimensional force sensor without coupling technology, applied in the field of sensors, can solve the problems of low sensitivity and large coupling between dimensions, and achieve the effect of improving sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
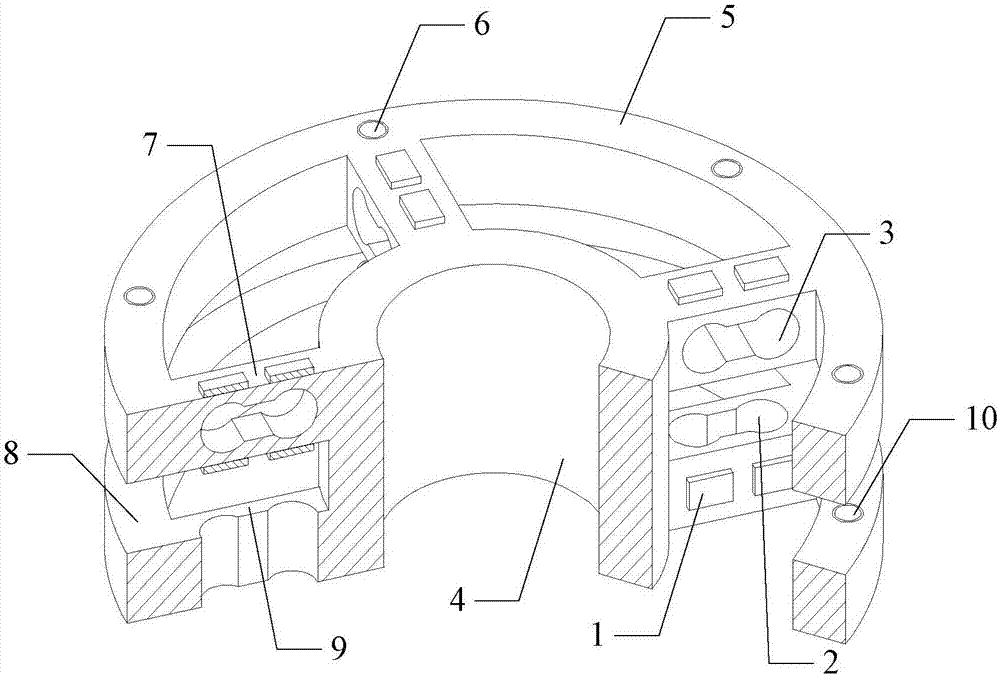
[0018] Specific implementation mode one: combine figure 1 Describe this embodiment, a binocular structure uncoupled six-dimensional force sensor described in this embodiment includes thirty-two strain gauges 1, a central hub 4, an upper platform loading platform 5, and four upper platform sensitive beams 7 , lower platform fixed platform 8 and four lower platform sensitive beams 9;
[0019] The upper platform loading platform 5 and the lower platform fixing platform 8 are both ring-shaped;
[0020] The center hub 4 is located at the center of the upper platform loading platform 5 and the center of the lower platform fixing platform 8 at the same time;
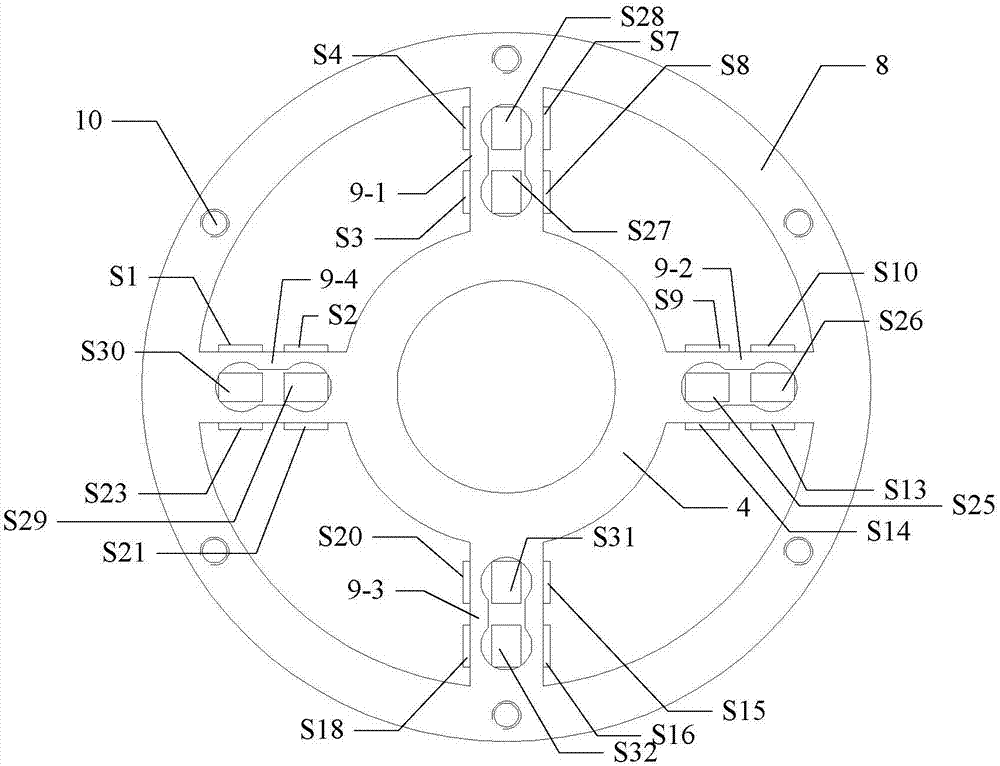
[0021] One end of each lower platform sensitive beam 9 is fixed on the outer wall of the center hub 4 bottom, and the other end of each lower platform sensitive beam 9 is fixed on the inner wall of the lower platform fixed platform 8; and each lower platform sensitive beam 9 is There is a No. 1 binocular structure through hol...
specific Embodiment approach 2
[0026] Specific Embodiment 2: This embodiment is to further limit the uncoupled six-dimensional force sensor of a binocular structure described in Specific Embodiment 1. In this embodiment, the shape of the through hole 2 of No. 1 binocular structure and the The shape of the No. binocular structure through hole 3 is identical; to set the measuring range.
[0027] In this embodiment, the cross-sectional area of the No. 1 binocular structure through hole 2 and the cross-sectional area of the No. 2 binocular structure through hole 3 may be the same or different.
specific Embodiment approach 3
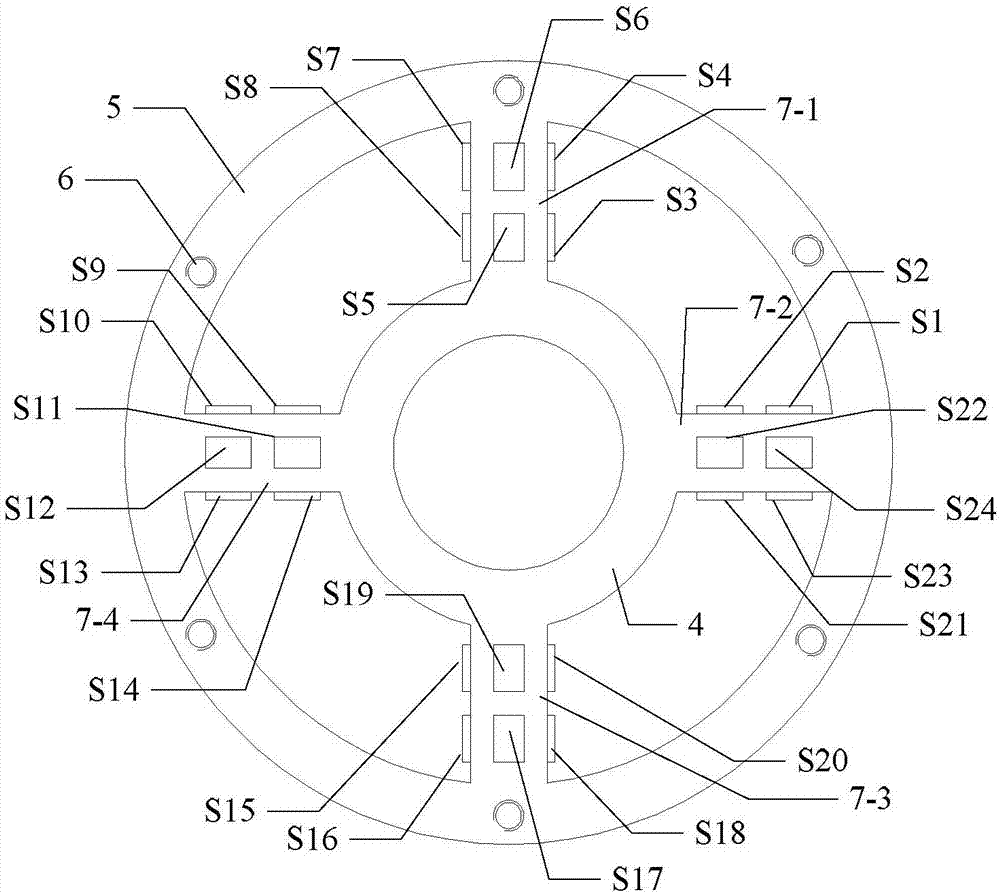
[0028] Specific embodiment three: This embodiment is to further limit the uncoupled six-dimensional force sensor of a binocular structure described in specific embodiment one. In this embodiment, four lower platform sensitive beams 9 The circumferential direction is evenly distributed; the four upper platform sensitive beams 7 are evenly distributed along the circumferential direction of the central hub 4 .
[0029] In this embodiment, the included angle between two adjacent lower platform sensitive beams 9 is 90 degrees, and the included angle between two adjacent upper platform sensitive beams 7 is also 90 degrees.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More