

Competitive foot combat robot
A robot, foot-type technology, applied in the field of competitive foot-type confrontation robots, can solve the problems of insufficient ability, no forward rotation, single attack method, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
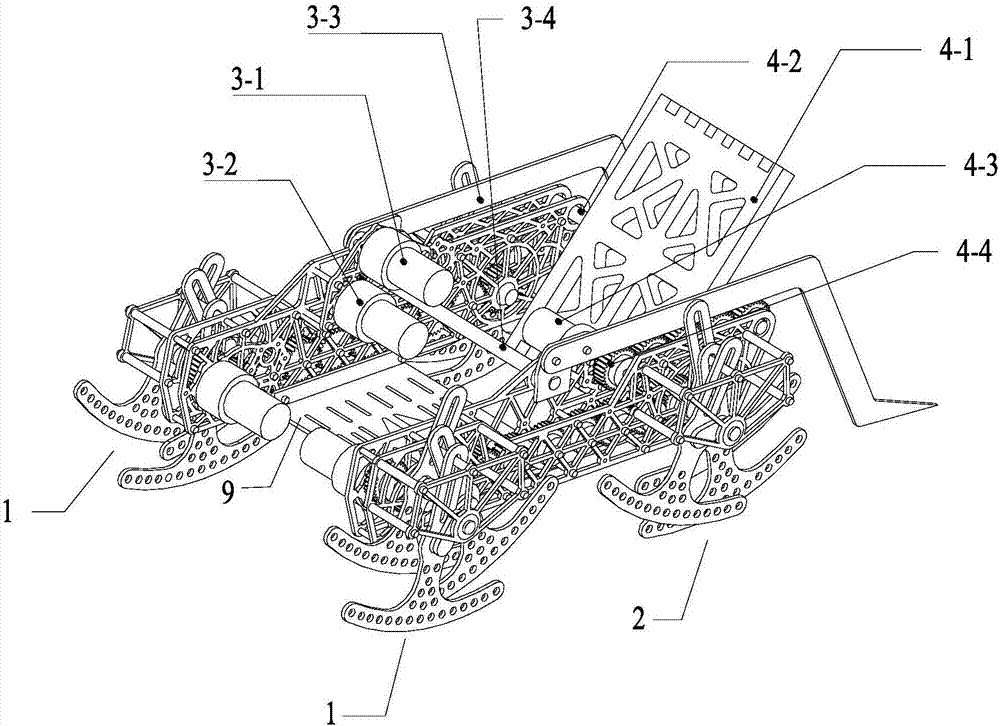
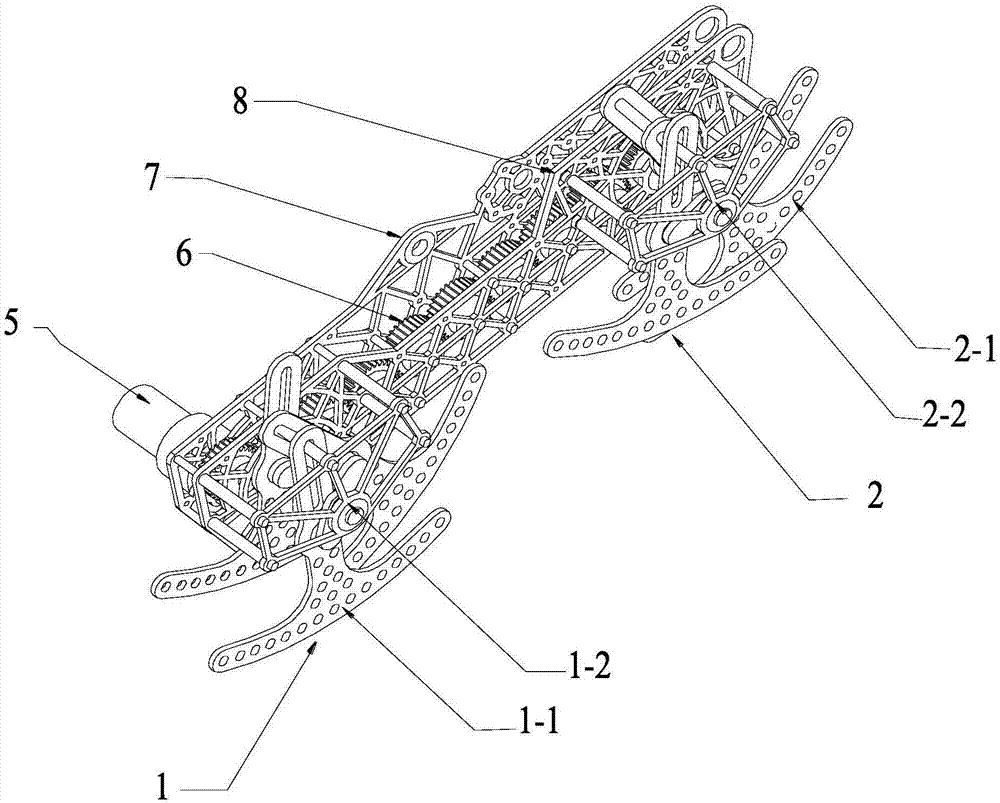
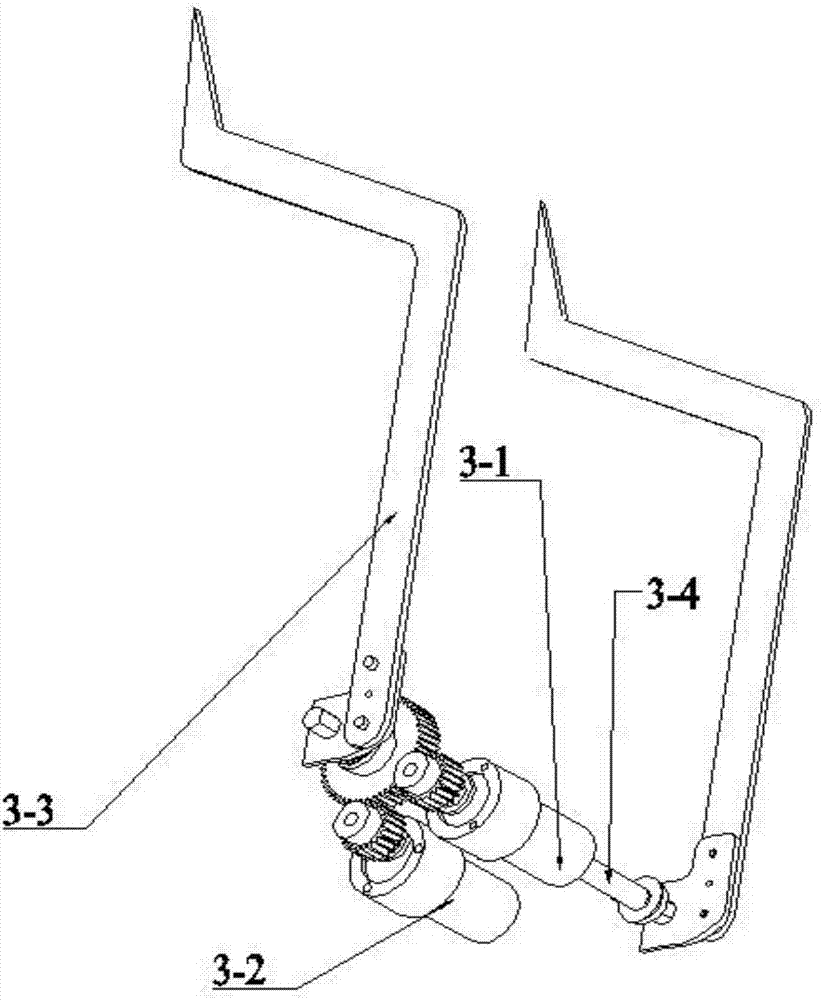
[0023] Such as figure 1 Shown, a kind of foot type confrontation robot that is used for competition comprises chassis 9, is connected with chassis 9 by baffle plate and left and right symmetrical front walking mechanism 2 and rear walking mechanism 1, is installed in the attacking mechanism between baffle plate, is rear The driving device that the running gear 1 provides power, the transmission device that connects the front running gear 2 and the rear running gear 1; The walking feet are all connected in parallel on the crankshaft 10 by three foot pieces 11 and can rotate around the shaft diameter of the crankshaft; each foot piece 11 is provided with a groove on the foot piece, and the pin shaft is reinforced on the outer side by the groove. Between the plate and the foot cover, the foot piece can slide along the shaft diameter of the pin shaft. In the present application, the driving device of the traveling mechanism is a motor, and the transmission device is a gear transm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More