

An Online Optimal Stabilization Control Method for Wheeled Mobile Stage Robot
A technology of stabilizing control and control method, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as difficulty in implementation, multiple setting parameters, complex online calculation, etc., and achieve simple online implementation and strong versatility , design simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
[0040] refer to Figure 1 ~ Figure 3 , an on-line optimized stabilization control method for a wheeled mobile stage robot, the control method comprising the steps of:
[0041] 1) Establish a discrete-time dynamic model for the moving process of the wheeled mobile stage robot, see formula (1):
[0042]
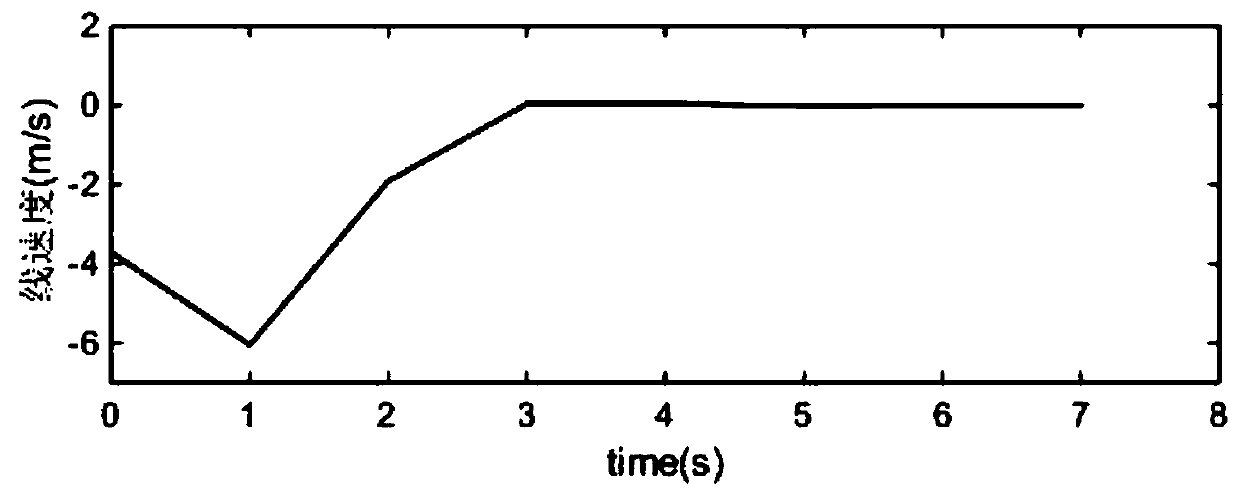
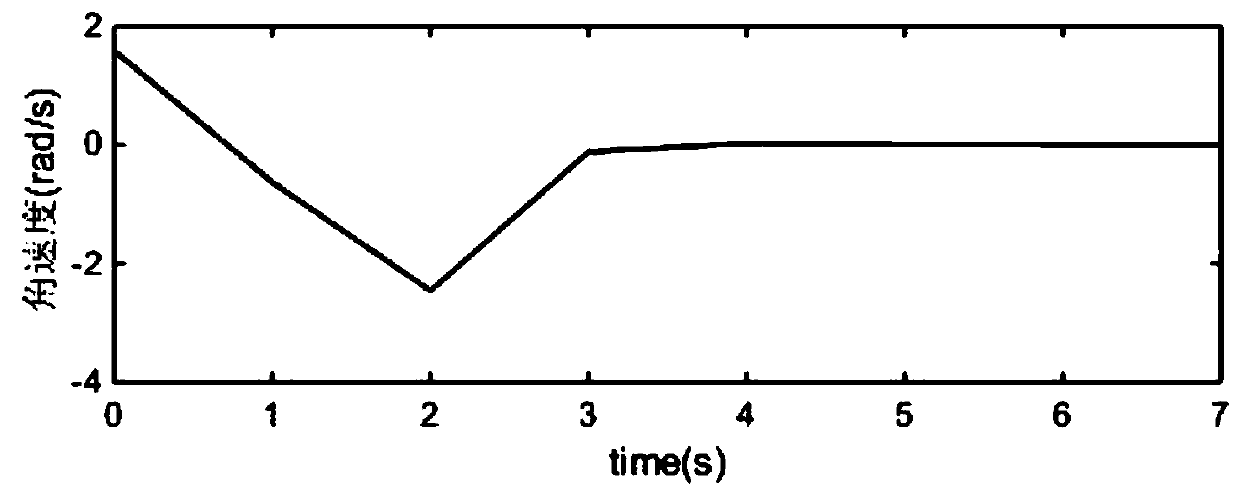
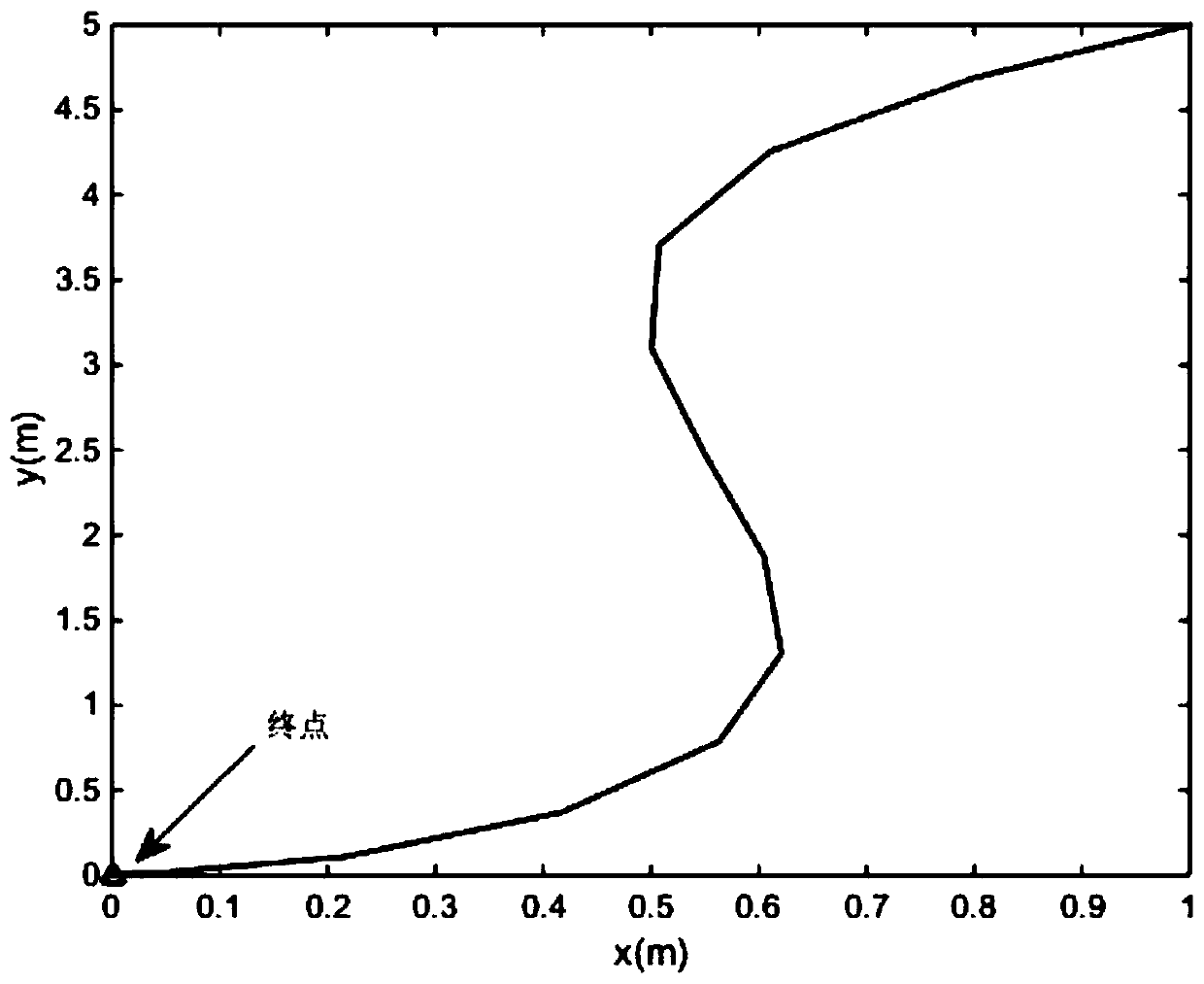
[0043] Among them, the normal constant T s Represents the sampling period, variable k represents the sampling moment; x 1 (k) and x 2 (k) respectively represent the position coordinates of the wheeled mobile stage robot in the X direction and the Y direction in the stage Cartesian coordinate system at time k; x 3 (k) represents the azimuth angle of the wheeled mobile stage robot in the Cartesian coordinate system at time k; u 1 (k) and u 2 (k) represent respectively the linear velocity and the angular velocity of the wheeled mobile stage robot at k moments; con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More