

Automatic driving method and device of automobile
A technology for automatic driving and automobiles, applied in two-dimensional position/course control, vehicle position/route/height control, motor vehicles, etc., can solve problems such as unavailable and difficult to make driving actions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
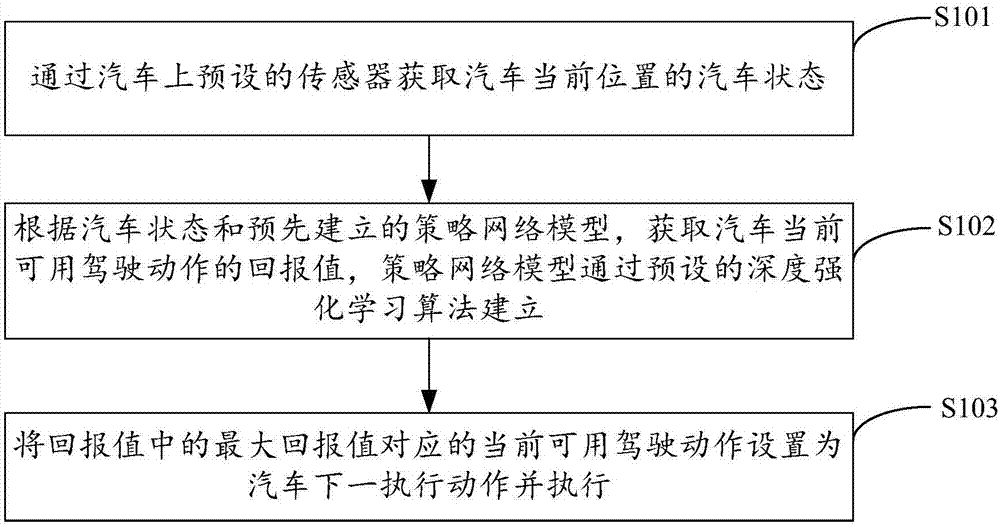
[0021] figure 1 It shows the implementation process of the automatic driving method of the automobile provided by Embodiment 1 of the present invention. For the convenience of description, only the parts related to the embodiment of the present invention are shown, and the details are as follows:
[0022] In step S101, the vehicle state at the current location of the vehicle is acquired through preset sensors on the vehicle.
[0023] The embodiments of the present invention are applicable to automobiles and automatic driving platforms or equipment on automobiles. The state of the automobile refers to a state during the driving process of the automobile, which can be represented by the current parameter values of various components such as automobile tires, steering wheels, and engines. Various sensors (for example, radar, ultrasonic, visual sensors, etc.) set or installed on the computer can be obtained. As an example, the state can be represented by parameters such as the ...
Embodiment 2
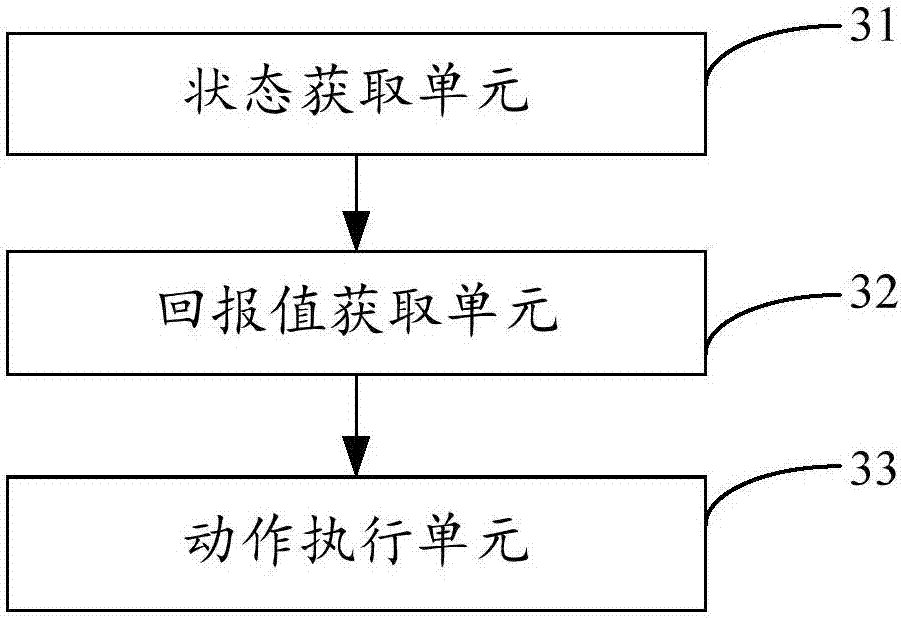
[0039] image 3 The structure of the automatic driving device of the automobile provided by the second embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0040] A state acquisition unit 31, configured to obtain the vehicle state of the current position of the vehicle through preset sensors on the vehicle;
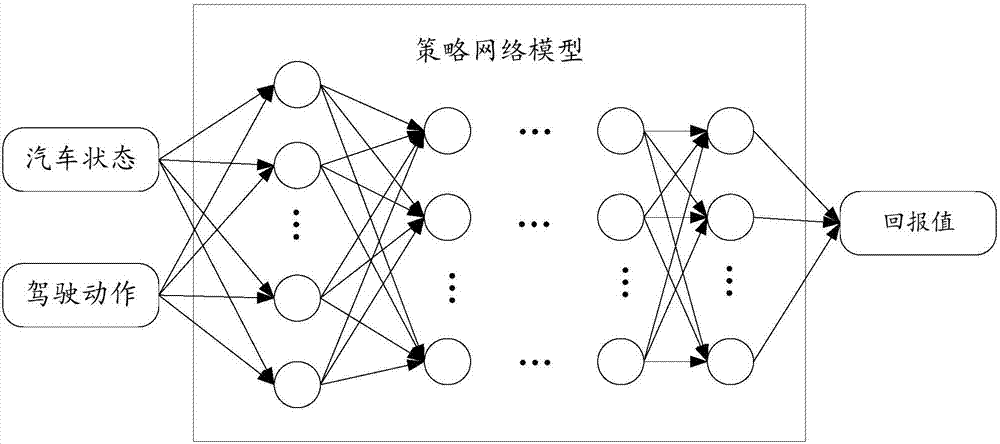
[0041] The reward value acquisition unit 32 is used to obtain the reward value of the currently available driving action of the car according to the state of the car and the pre-established policy network model, wherein the policy network model is established by a preset deep reinforcement learning algorithm; and
[0042] The action execution unit 33 is configured to set and execute the currently available driving action corresponding to the maximum reward value among the reward values as the next execution action of the car.
[0043] In the embodiment...
Embodiment 3
[0045] Figure 4 The structure of the automatic driving device of the automobile provided by the third embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0046] The initialization unit 41 is used to initialize the set policy network model, set the immediate reward function of the car driving action, and initialize the reward value of the immediate reward function;
[0047] The maximum value obtaining unit 42 is used to receive the sample of the current training state of the car, calculate the immediate return value of each driving action in the action set of the car according to the current training state and the immediate return function, and obtain the maximum immediate return value in the immediate return value;
[0048] An action screening unit 43, configured to randomly select any driving action as the selected driving action, otherwise the driving acti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More