

Unmanned aerial vehicle multi-frame image self-adaptive positioning and correcting method based on aerial photography attitudes
A multi-frame image and aerial image technology, applied in the field of remote sensing image processing, can solve the problems of single-frame image not being fully utilized, unable to obtain unified and optimal results, etc., achieve high positioning accuracy, reduce the number of iterations, and improve positioning The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
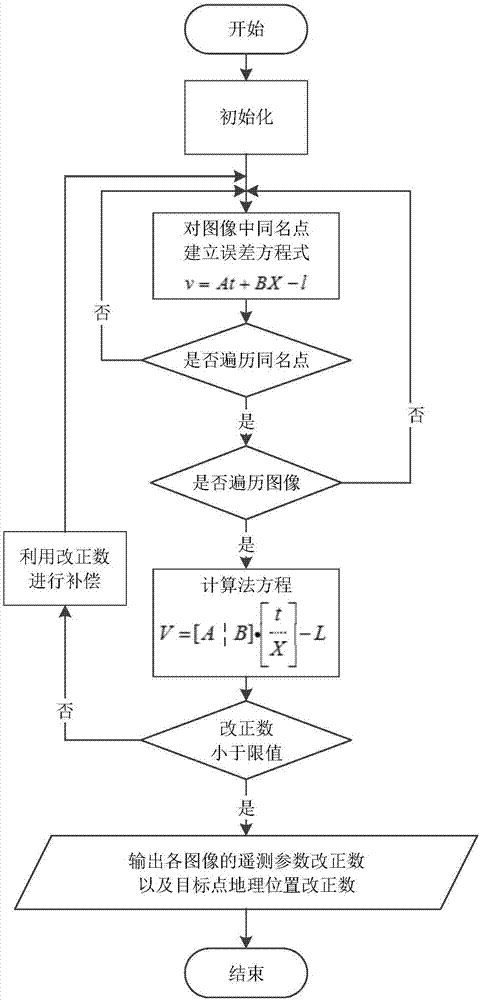
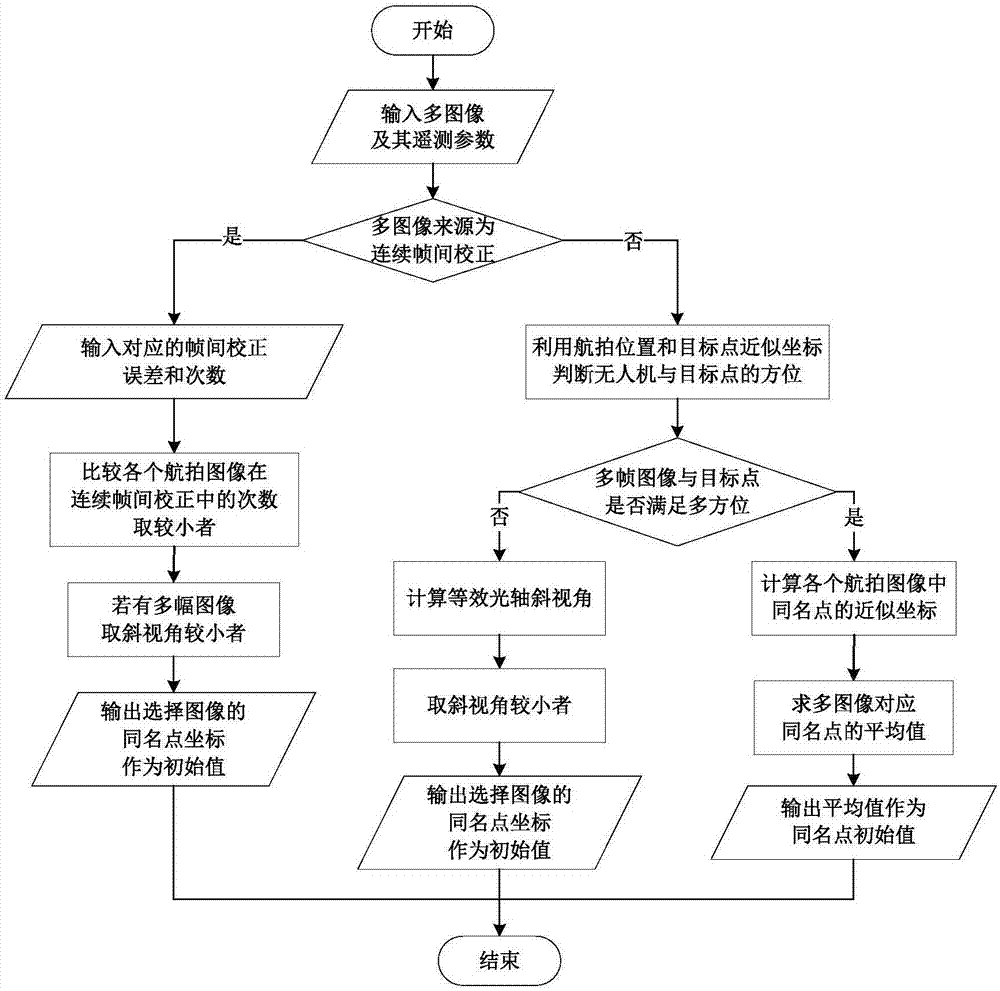
[0034] The present invention proposes an adaptive positioning correction method for multi-frame images of UAVs based on aerial photography attitude. The method adopts different initialization strategies for different sources of multi-frame images, so that the method can not only compensate the The systematic error of multi-frame images can further improve the parameter accuracy of continuous multi-frame correction and positioning. This method can accurately and real-time perform error correction on multiple acquired images with a common area during the online aerial photography process of the UAV, and improve the accuracy of positioning results.
[0035] The self-adaptive positioning and correction method of multi-frame images of UAV based on aerial photography attitude provided by the present invention, such as figure 1 shown, inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More