

Hand recognition method based on multi-sensor fusion technology
A multi-sensor fusion and recognition method technology, applied in the field of robot interaction, can solve the problems of real-time tracking of the position and posture of hands, recognition and tracking of hands occlusion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
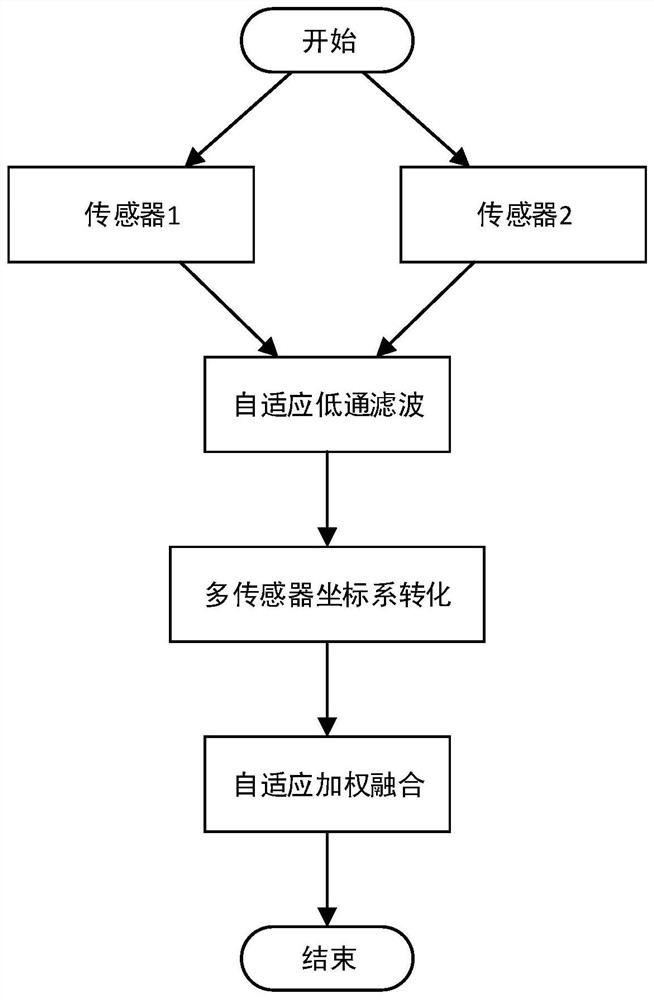
[0056] The present invention will be further described in detail below in conjunction with the examples, but the embodiments of the present invention are not limited to the examples. The present invention comprises the steps:
[0057] S1, adaptive low-pass filtering;
[0058] S2, multi-sensor coordinate system conversion;
[0059] S3. Adaptive weighted fusion.
[0060] Said step S1 comprises the following steps:
[0061] The basic idea of the speed-based adaptive filtering algorithm is to take the weighted average of the measured value at the current moment and the filtered value at the previous moment as the filtered value at the current moment, and its weight factor changes adaptively with the current moment's motion speed.
[0062] Let the data of the position and posture of a hand be expressed as X=(x, y, z, α, β, γ) T , where the first three components (x, y, z) are the center position of the hand, and the last three components (α, β, γ) are the posture of the hand ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More