

Improved-firefly-algorithm-based multi-unmanned-aerial-vehicle cooperative coupling task distribution method
A technology of firefly algorithm and task allocation, which is applied in the field of task planning and design, and can solve problems such as not considering task coupling constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
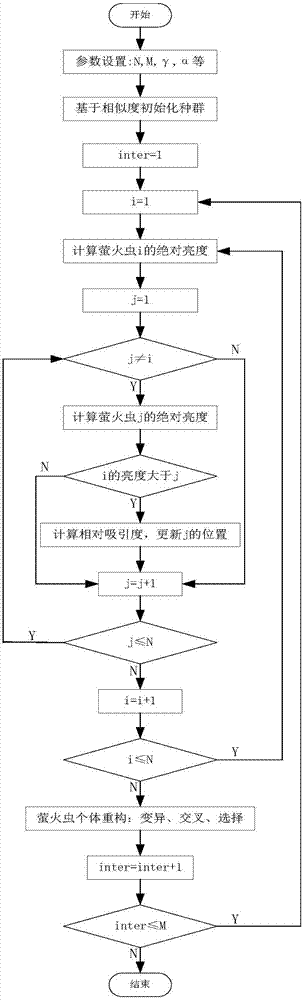
[0092] figure 1 For the DE-DFA algorithm flowchart of the present invention, the detailed steps of the present invention are as follows:
[0093] Step 1: Build a task assignment model under special coupling
[0094] In this step, the following definitions exist:
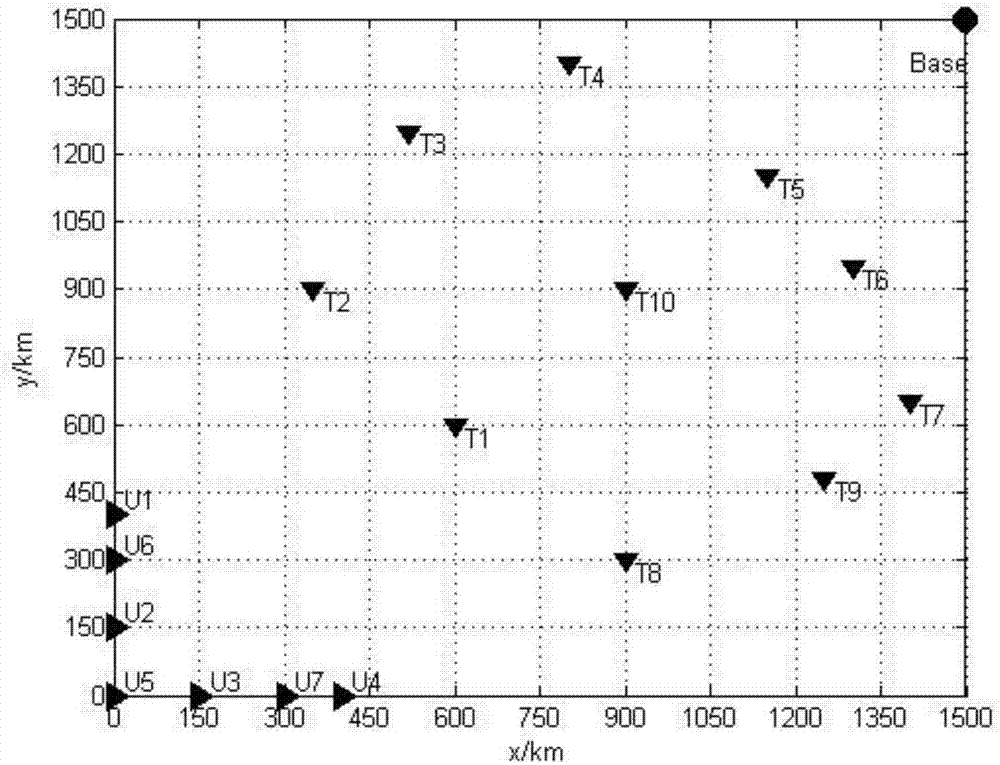
[0095]Definition 1: U={U 1 ,U 2 ,...,U i ,...,U M} is the set of drones, where U i Represents the i-th UAV, M represents the total number of UAVs;
[0096] Definition 2: T={T 1 , T 2 ,...,T j ,...,T N} is the target set, where T j Indicates the jth target, N is the total number of targets;
[0097] Definition 3: Task jh for target T j The hth type of task, h=1,2,3, when h=1 is confirmation, h=2 is strike, h=3 is damage assessment;
[0098] Definition 4: U jh To be able to perform tasks Task jh collection of drones;
[0099] Definition 5: TaskSequence i ={task1>task2>task3>....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More