

Three-line structured light-based camera plane calibration method
A calibration method and structured light technology, applied in image data processing, instruments, calculations, etc., can solve problems such as low calibration accuracy, inability to obtain camera distortion models, and difficulty in completely eliminating camera distortion errors, so as to improve accuracy and reduce artificial Interfere, reduce workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
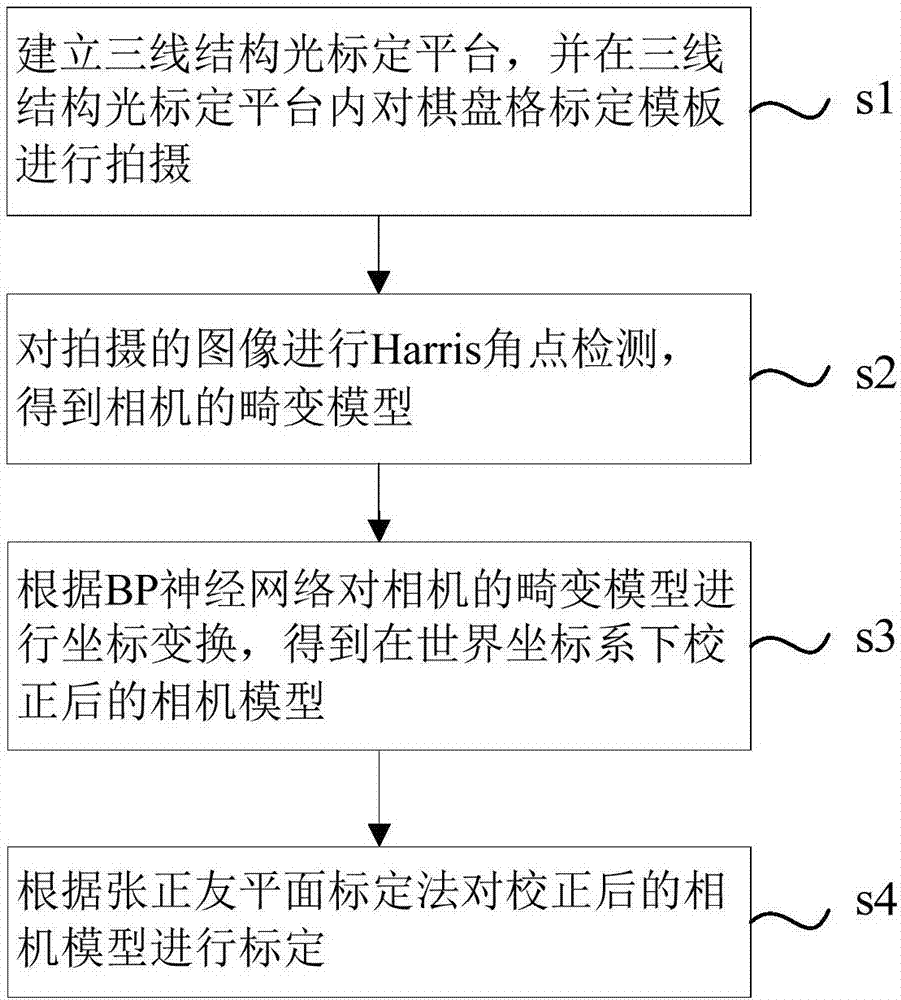
[0047] Such as figure 1 As shown, this embodiment provides a camera plane calibration method based on three-line structured light, which specifically includes the following steps:
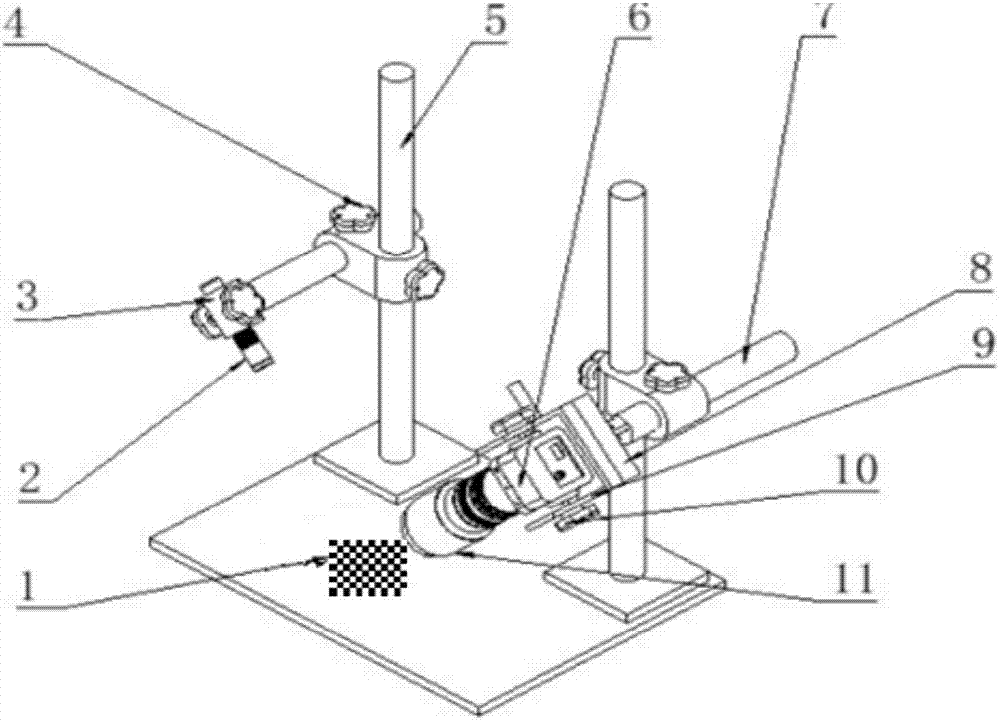
[0048] s1) Establish a three-line structure cursor calibration platform, and photograph the checkerboard calibration template 1 in the three-line structure cursor calibration platform;
[0049] s2) Carry out Harris corner detection to the image taken in step s1), obtain the distortion model of camera;
[0050] s3) Carry out coordinate transformation on the distortion model of the camera according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More