Transparent object 3D surface reconstruction method and apparatus based on background schlieren technology
A technology for three-dimensional surfaces and transparent objects, applied in 3D modeling, image data processing, instruments, etc., can solve problems such as low spatial resolution and difficult measurement of objects to be measured, and achieve high spatial resolution, convenient measurement, and simple configuration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0063] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
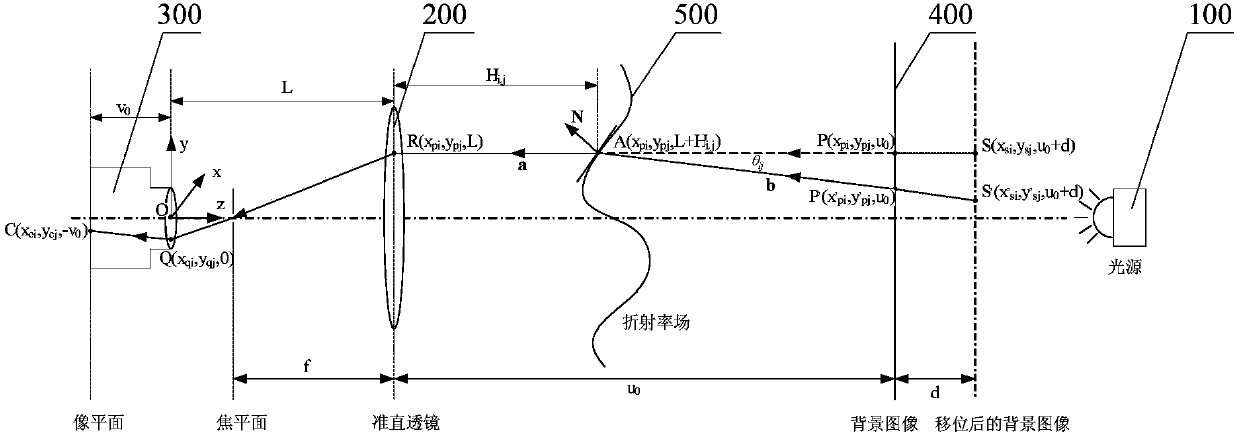
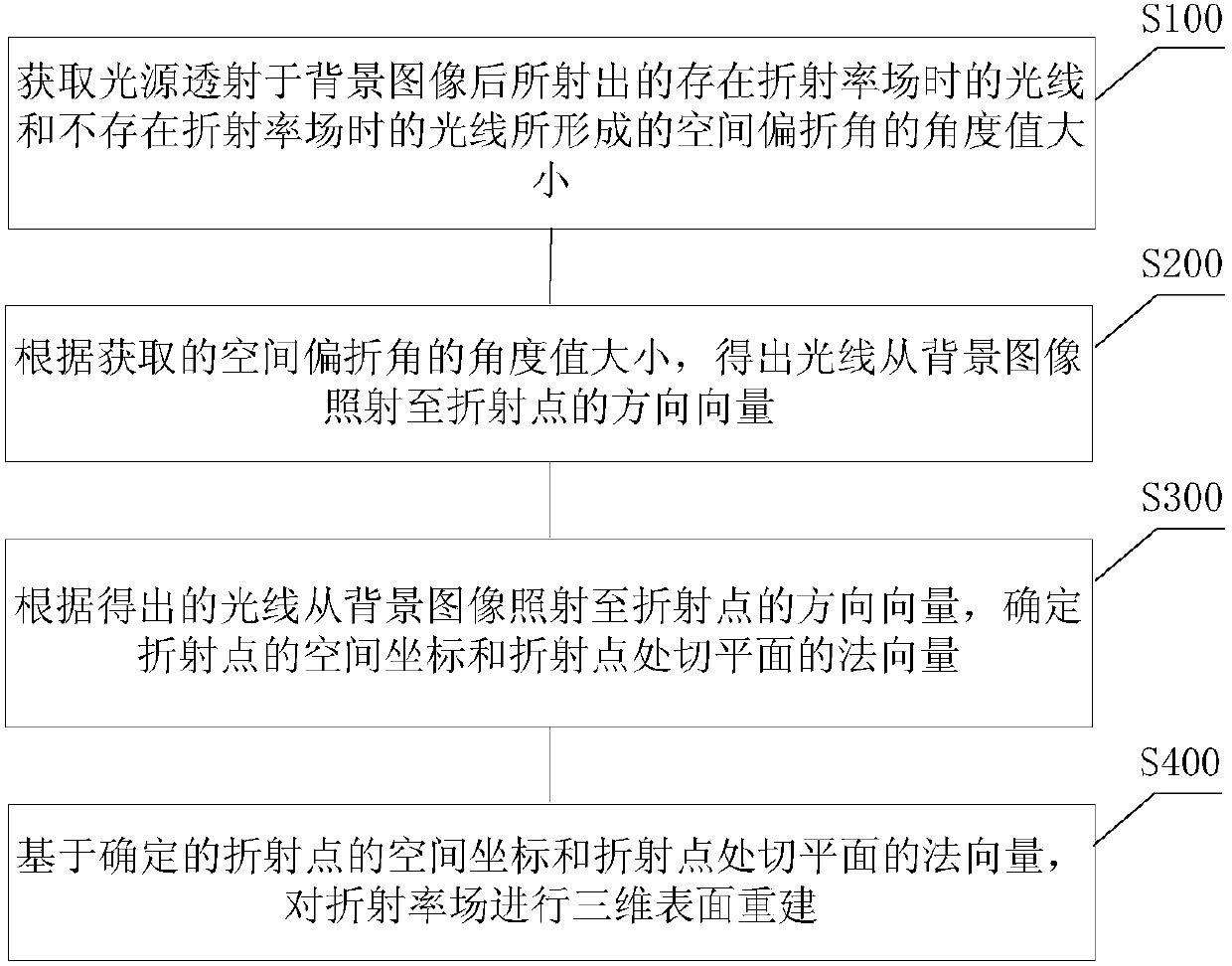
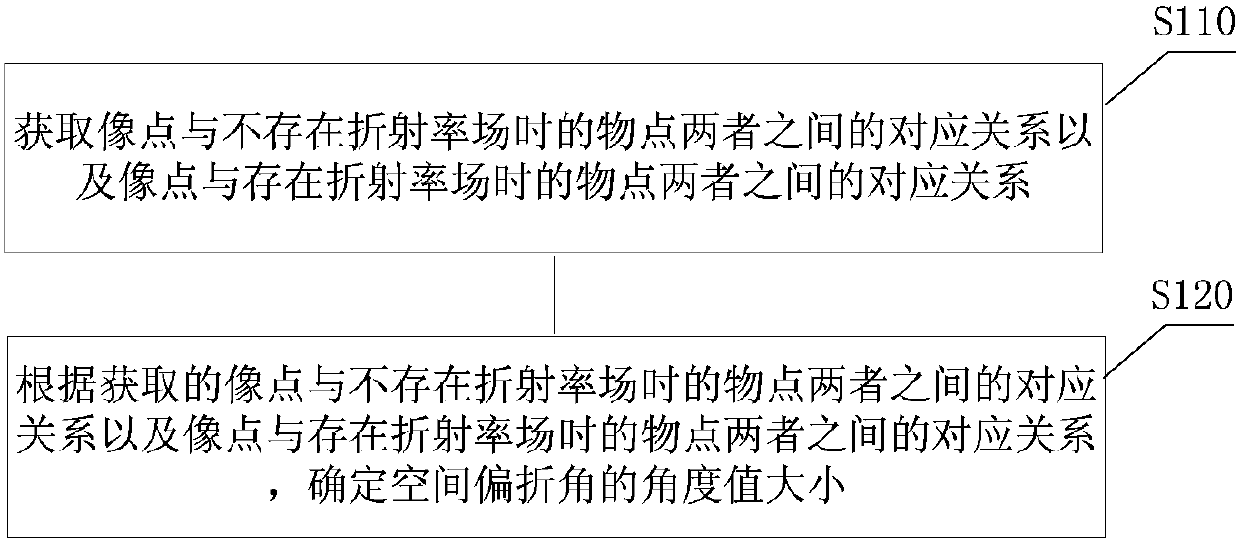
[0064] refer to figure 1 and figure 2 , a preferred embodiment of the present invention provides a three-dimensional surface reconstruction method for transparent objects based on background schlieren technology, which is applied to a three-dimensional surface reconstruction system for a refractive index field. The three-dimensional surface reconstruction system for a refractive index field includes sequentially installed light sources 100, quasi- A straight lens 200 and a camera 300, the light source 100 is used to emit light and transmit the emitted light on the object point of the background image 400; the collimator lens 200 is used to collect the light after passing through the object po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



