Robot remote teaching system based on virtual reality
A robot and teaching technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
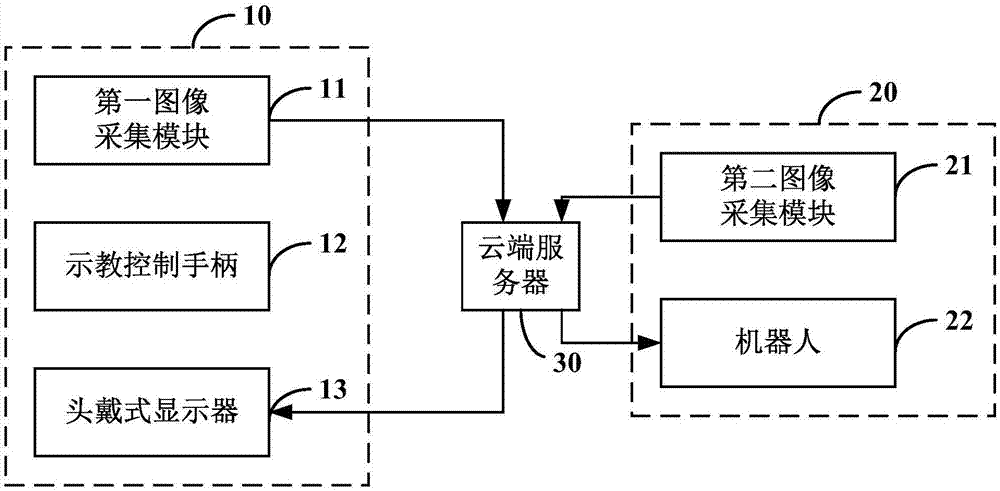
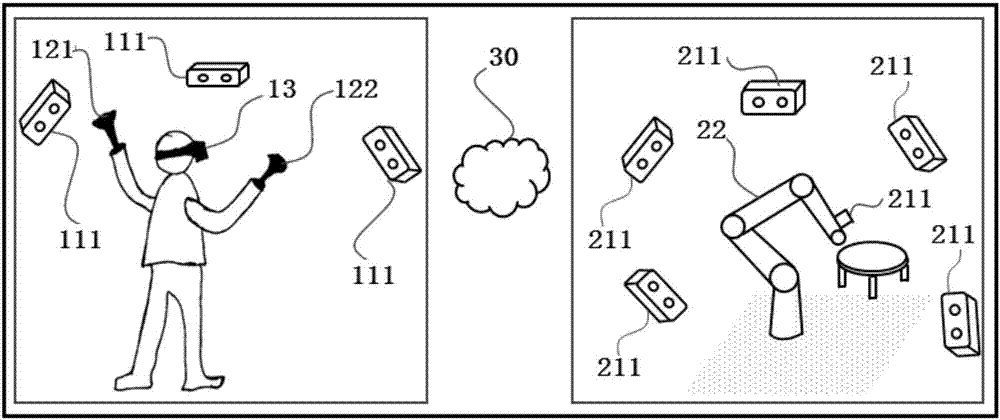
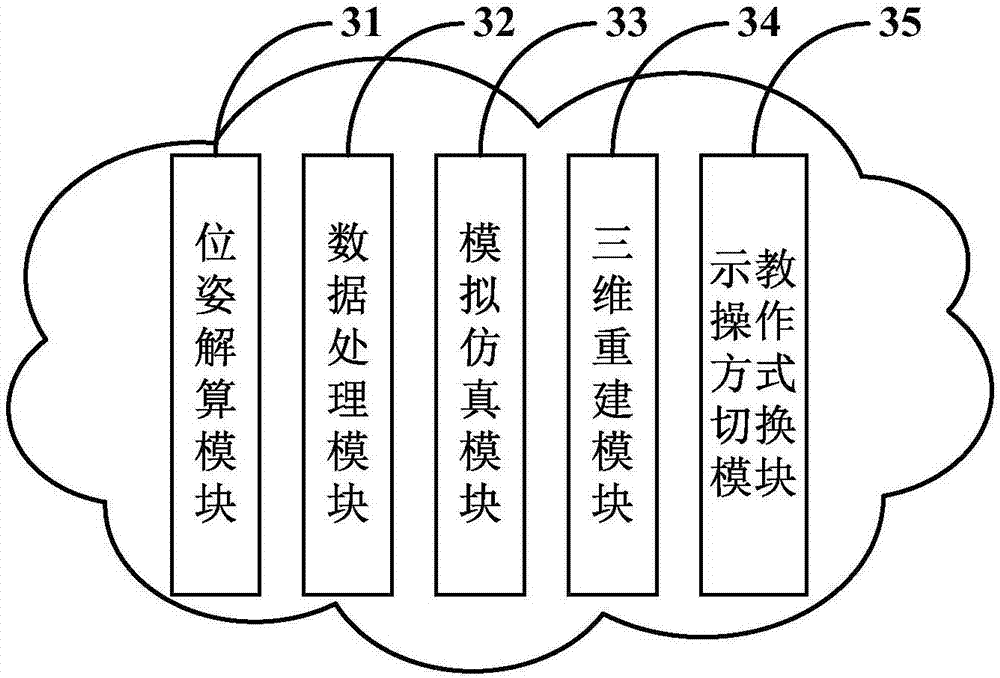
[0057] At present, the remote teaching method of the robot is limited by the unknown factors of the robot and its on-site operating environment, and cannot efficiently teach the robot remotely. Based on this, the present invention provides a robot remote teaching system based on virtual reality, which can realize remote teaching control of the robot in a virtual environment by constructing a three-dimensional space scene image of the robot and its on-site operating environment. At the same time, the system can also carry out learning and teaching operations for the robot, so that the robot can accurately complete the teaching action even when ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More