

Limb movement bionic structure and bionic robot rat comprising same
A bionic robotic mouse and limb technology, applied in the field of bionic robotic mice, can solve the problems of not reflecting the flexibility of the limbs of the bionic robotic mouse, failing to reflect the compactness, and increasing the structural complexity of the bionic robotic mouse, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
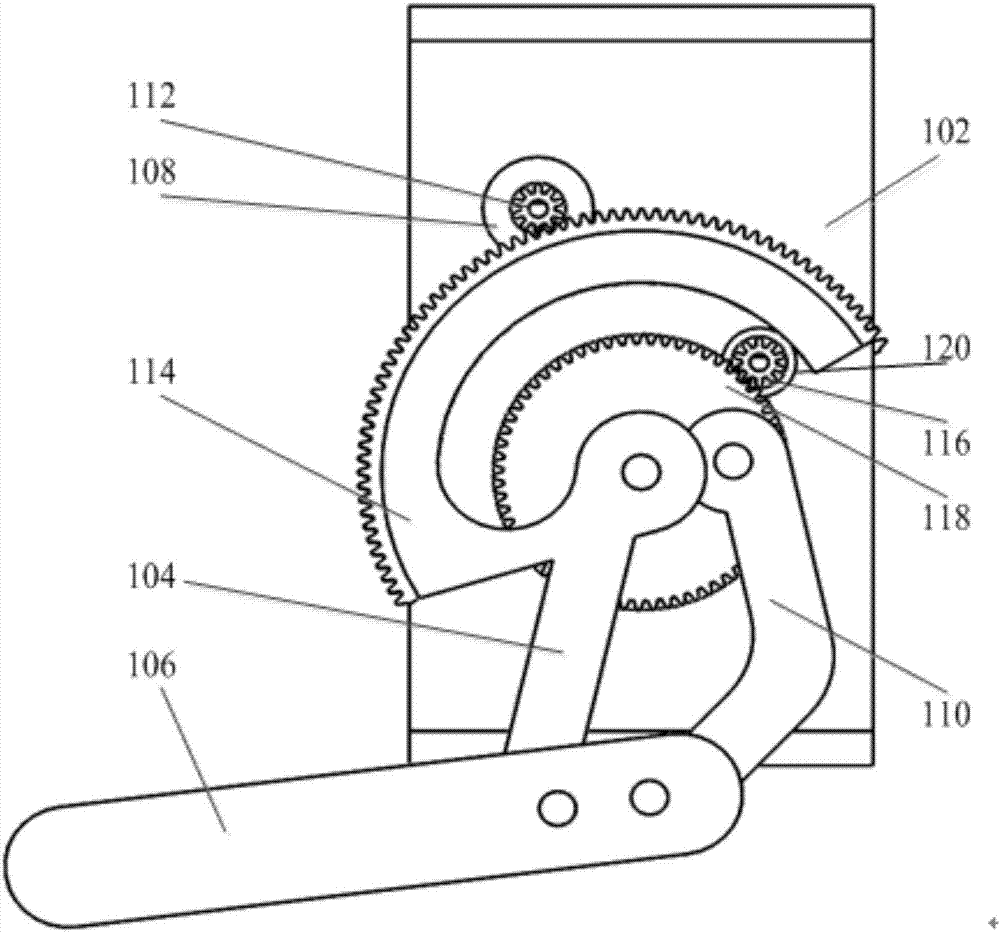
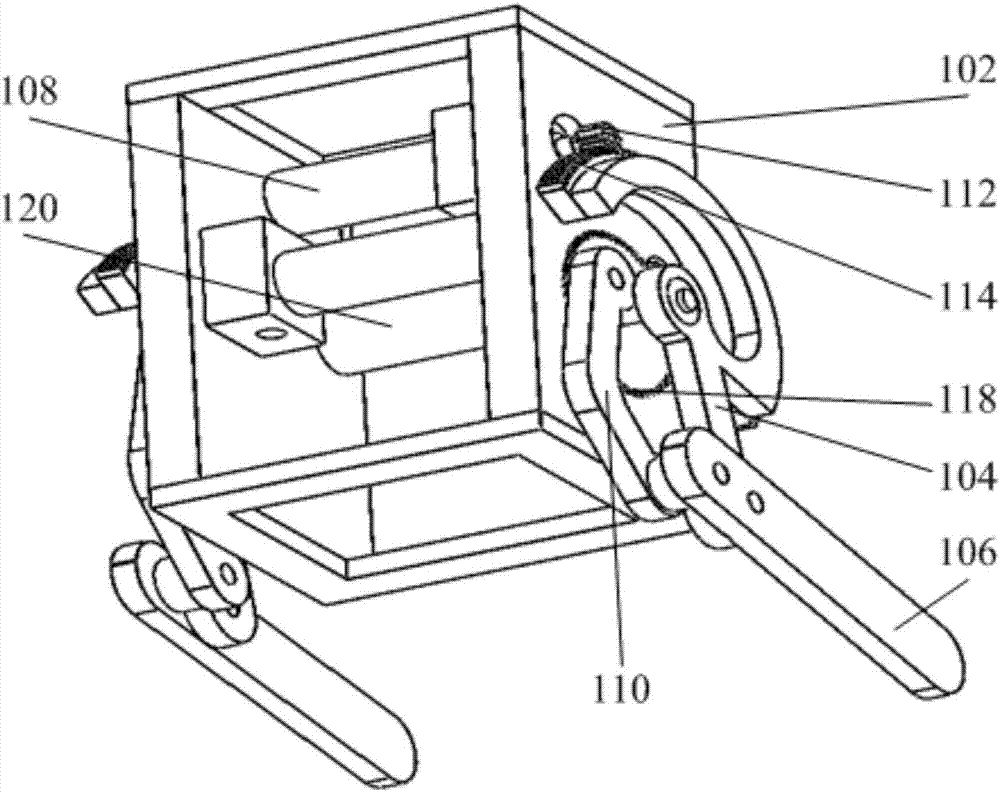
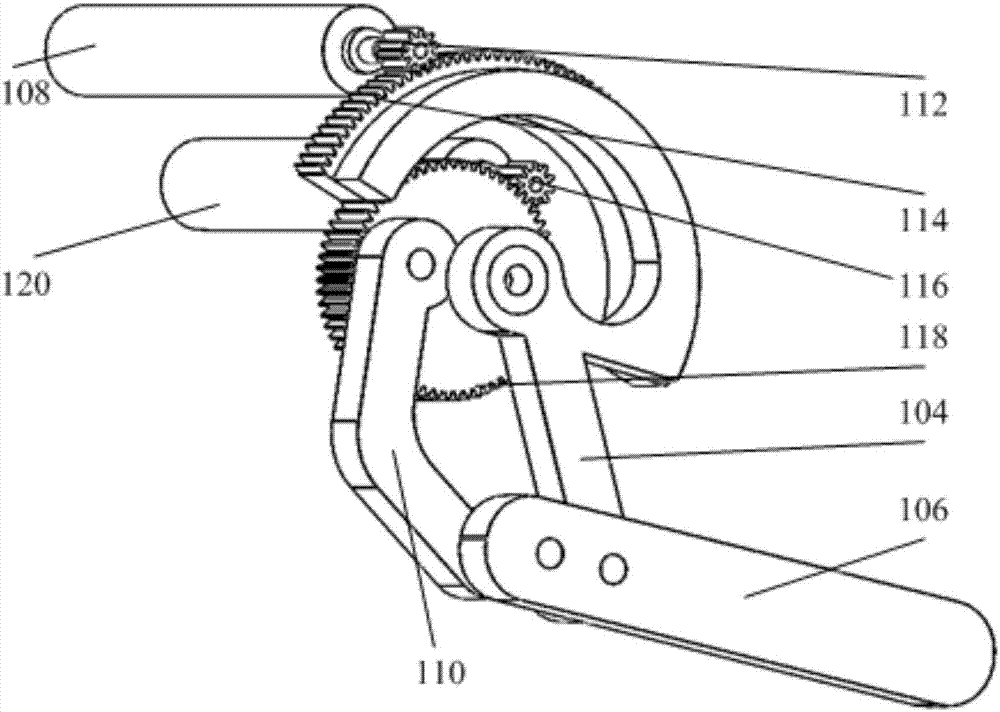
[0021] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. It should be understood by those skilled in the art that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention. Those skilled in the art can Adjust it as necessary to suit the specific application. For example, although the deceleration device set in this specification is an external gear deceleration device, the deceleration device in this specification is not limited to an external gear deceleration device, and the deceleration device in this specification can also be an internal gear deceleration device, or For other non-gear reduction devices, this change does not depart from the principle and scope of the present invention.
[0022] It should be noted that the present invention relates to the technical field of mechanical transmission. Those ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More