

Time optimal trajectory planning method for robotic arm
A trajectory planning, time-optimized technology, applied in genetic laws, general control systems, instruments, etc., can solve problems such as low optimization efficiency, premature convergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] In order to make the technical means and effects realized by the present invention easy to understand, the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
[0037]
[0038] Step 1, discretize the task space of the manipulator into multiple trajectory interpolation points, obtain the pose matrix sequence Ti and the corresponding time node sequence ti, perform an inverse operation on the pose matrix sequence Ti to obtain the corresponding joint position qi, the joint position The relationship between qi and time node sequence ti is shown in the following formula (1):
[0039] S=(qi,ti)i=1,2...,n (1)
[0040] In the above formula (1), S is the joint position-time binary sequence, ti>0.
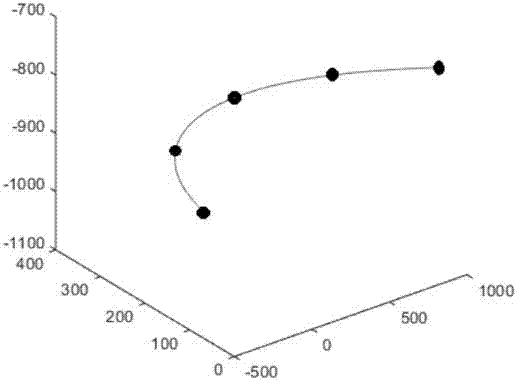
[0041] figure 1 is the model of the robotic arm in the embodiment of the present invention.
[0042] figure 2 is the trajectory graph of the end effector of the robotic arm in the embodiment of the present invention....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More