A flexible tendon assisting device for human trochlear joints
A power-assisted device and tendon technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of harmful torque, not comfortable enough to wear, and bulky power-assisted exoskeleton, and achieve precise power-assisted transmission, light and flexible wear, and good flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with accompanying drawing:
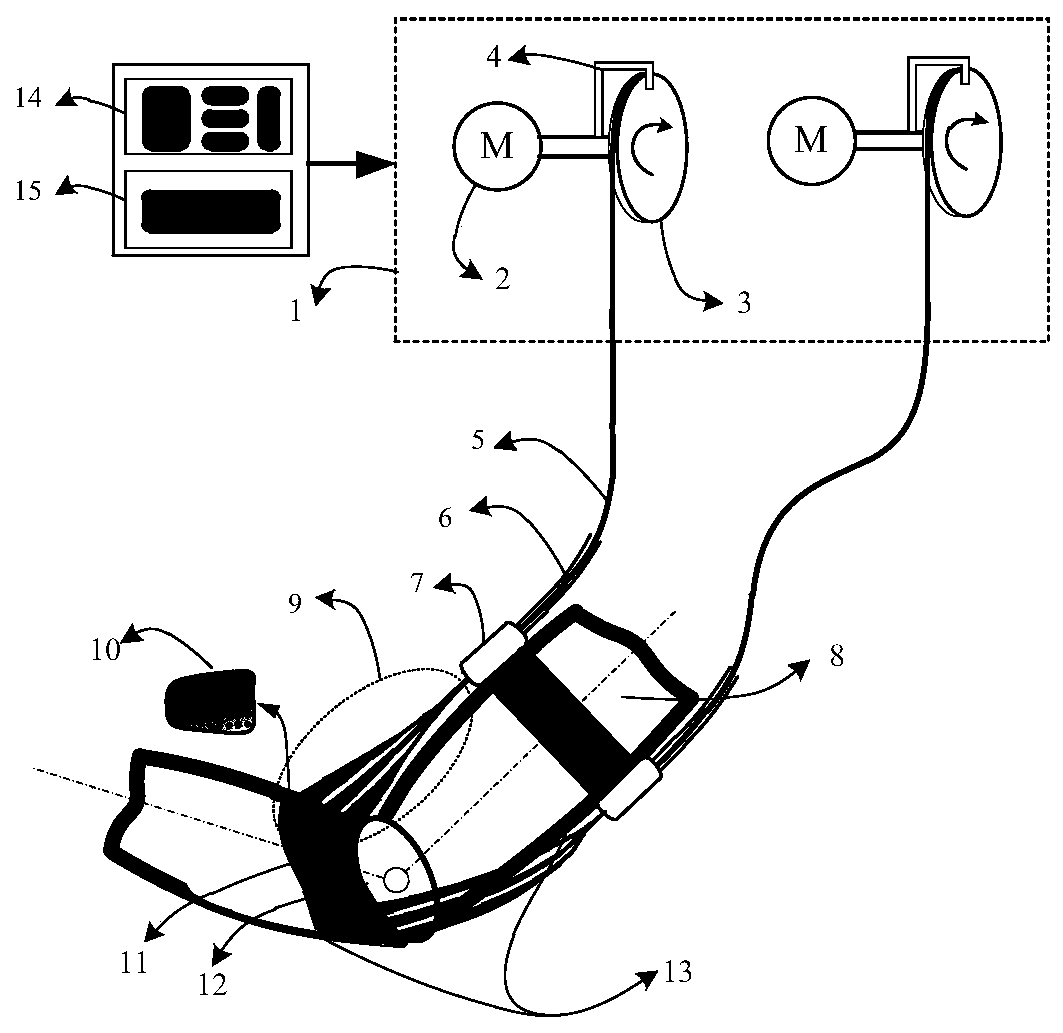
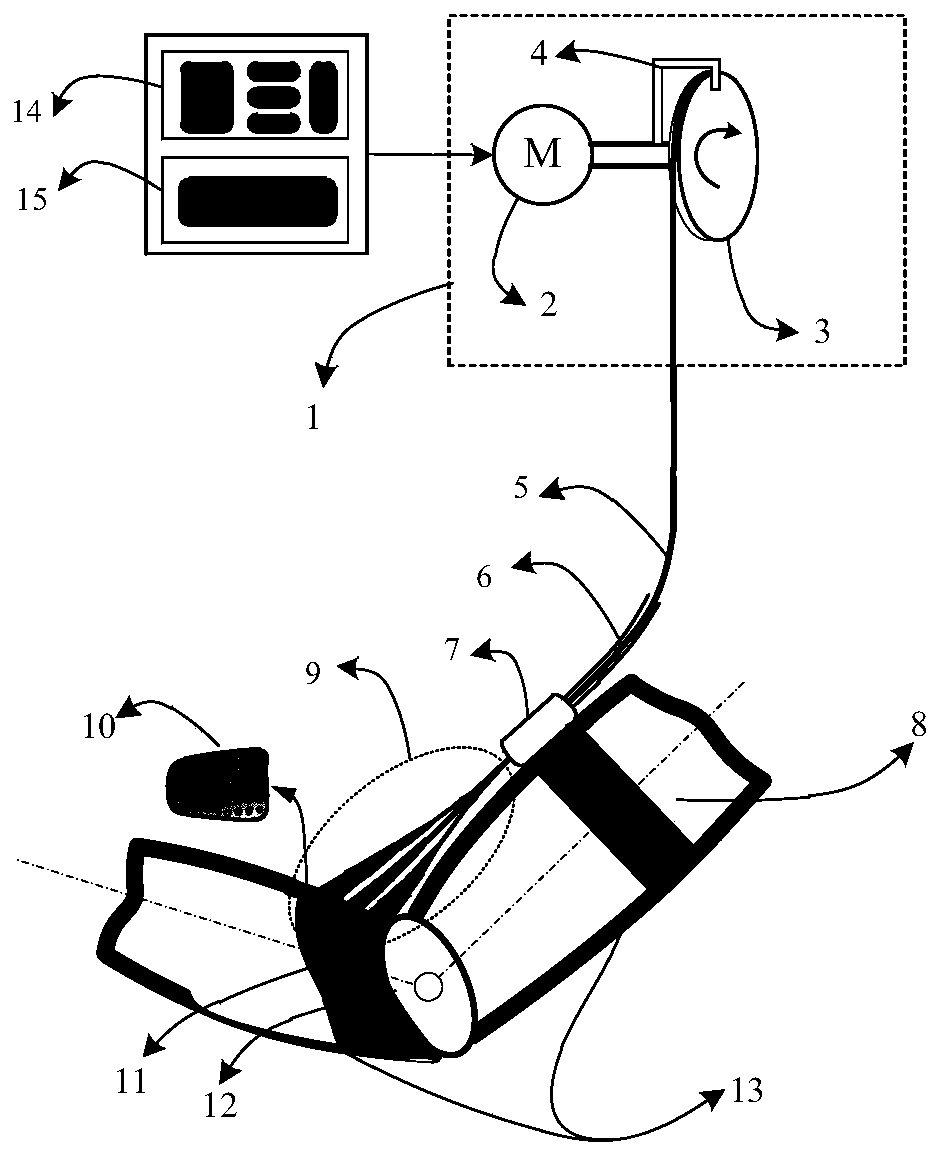
[0030] Based on the in-depth study of the compound motion model of human pulley joints, the present invention proposes a joint assisting method using multi-branched parallel bionic flexible tendons, and optimizes the branch chain stiffness, attachment point, size, etc. of the tendons so that it can Well follow the compound motion form of the pulley joint, obtained as figure 1 The flexible tendon assisting device shown in the figure drives two sets of flexible tendons through two motors to assist the bidirectional movement of any pulley joint of the human body. The device mainly includes: hoist 1, rope 5, wire sheath 6, wire sheath end fixing sleeve 7, parallel flexible tendon 9, close-fitting fabric 8, elastic fixing belt 11, etc.
[0031] According to the specific application scenarios, the present invention can decide whether to perform one-way or two-way power assist on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com