A Disturbance Observer Based Impedance Control Method for Parallel Robots
A technology of disturbance observer and impedance control, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., which can solve the problem of impediment error convergence, impedance control stability and compliance, safety, reliability, inability to guarantee, inability to guarantee the stability of impedance control issues of sex and effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
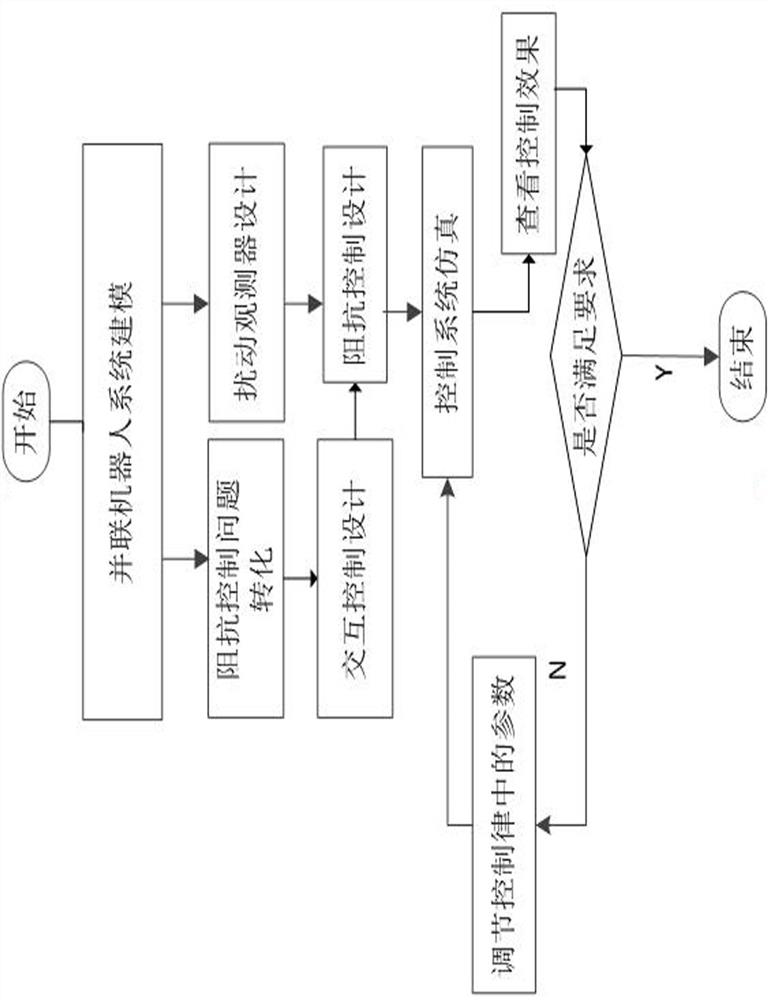
[0048] Below in conjunction with accompanying drawing, the present invention is further described:
[0049] like Figure 1-4 A method for impedance control of a parallel robot based on a disturbance observer is shown, including the following steps:
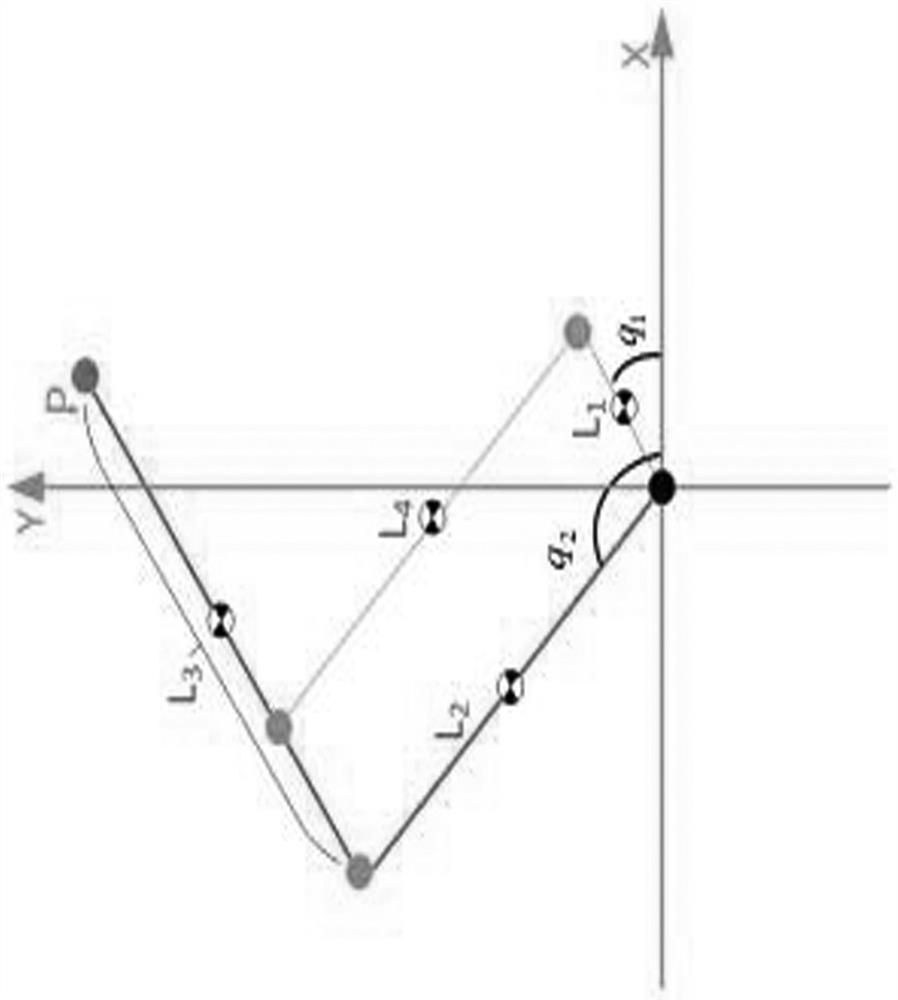
[0050] Step 1, establish the Euler-Lagrangian model of the five-bar parallel robot:
[0051]
[0052] Where: q=[q 1 q 2 ] T ∈R 2 is the joint angle vector; is the joint velocity vector; is the joint acceleration vector; M(q)∈R 2×2 is the inertia matrix; Indicates Coriolis moment and centripetal moment; G(q)∈R 2 is the moment of gravity; Represents the lumped uncertainty item, where Indicates the friction torque, t d (t) represents external disturbance; t∈R 2 is the control input; t e =J T (q)f e ∈R 2 is the robot-environment interaction force in joint space, where J(q) is the Jacobian matrix, f e =[f e1 f e2 ] T ∈R 2 is the terminal interaction force;
[0053] The matrix M(q), and J(q) are expresse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



