

Kinect visual information-based robot environment identification and operation control method
A technology of environmental recognition and visual information, applied in general control systems, control/adjustment systems, instruments, etc., can solve problems such as difficult to achieve scheduled tasks, unstable operation control, long time required, etc., to achieve stability and Less precision, less control over intricate details, avoiding the effect of instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
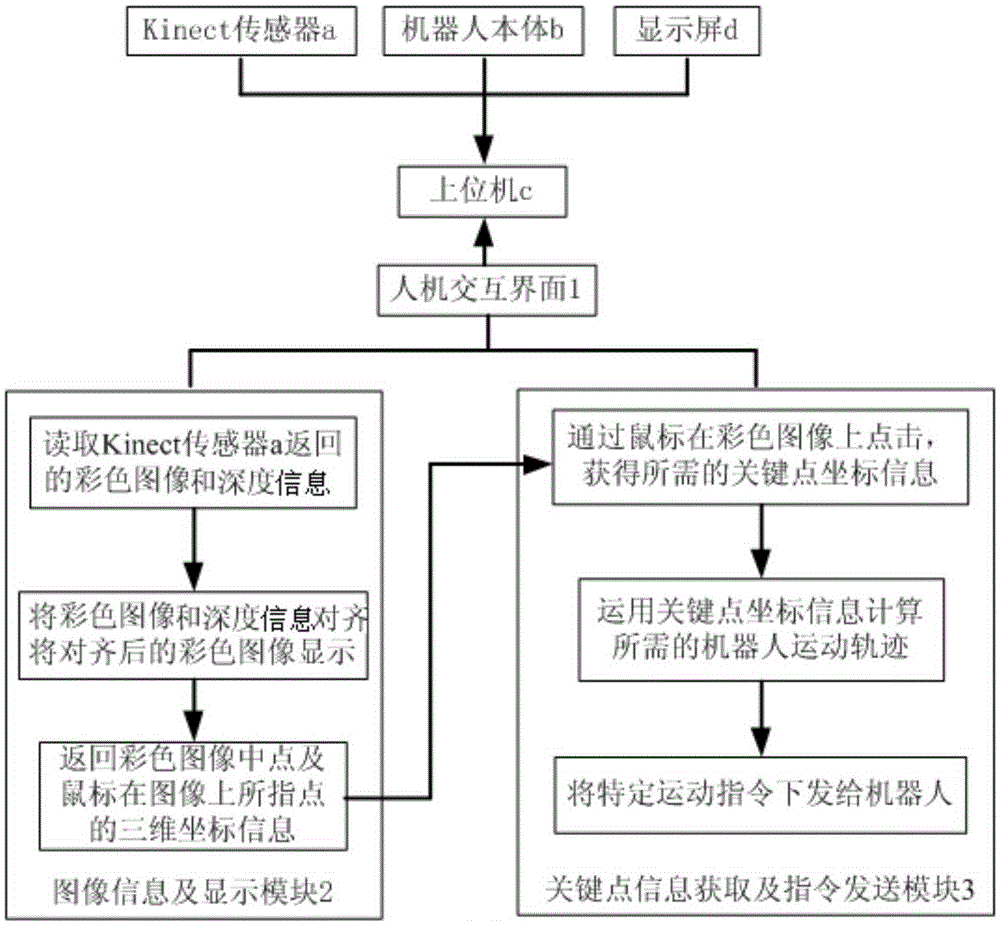
[0026] The specific embodiment one, a kind of robot environment recognition and operation control method based on Kinect visual information described in this embodiment is realized based on the hardware system comprising Kinect sensor a, robot body b, upper computer c and display screen d; Kinect The sensor a, the robot body b and the display screen d are all connected to the upper computer c;
[0027] A software system comprising a human-computer interaction interface 1, an image and information display module 2, a key point information acquisition and an instruction sending module 3 is installed in the host computer c; the human-computer interaction interface 1 completes the image and information display module 2 and the key The call of point information acquisition and instruction sending module 3; the image and information display module 2 realizes the acquisition and display of color image and depth information, and the acquisition of the three-dimensional coordinates of t...
specific Embodiment approach 2
[0039] Embodiment 2. This embodiment is a further description of the Kinect visual information-based robot environment recognition and operation control method described in Embodiment 1. The upper computer c is also connected to a keyboard and a mouse.
specific Embodiment approach 3
[0040] Specific embodiment three, this embodiment is a further description of a kind of robot environment recognition and operation control method based on Kinect visual information described in specific embodiment one or two, Kinect sensor a described in step one, with 30Hz The frequency sends back a color image and depth information of the robot's surroundings.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More