

Six-link mechanical arm device with adjustable degree of freedom
A technology of robotic arms and degrees of freedom, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of long manual adjustment process, loose connecting rod tension, waste of time, etc., and achieve the effect of long manual adjustment process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment
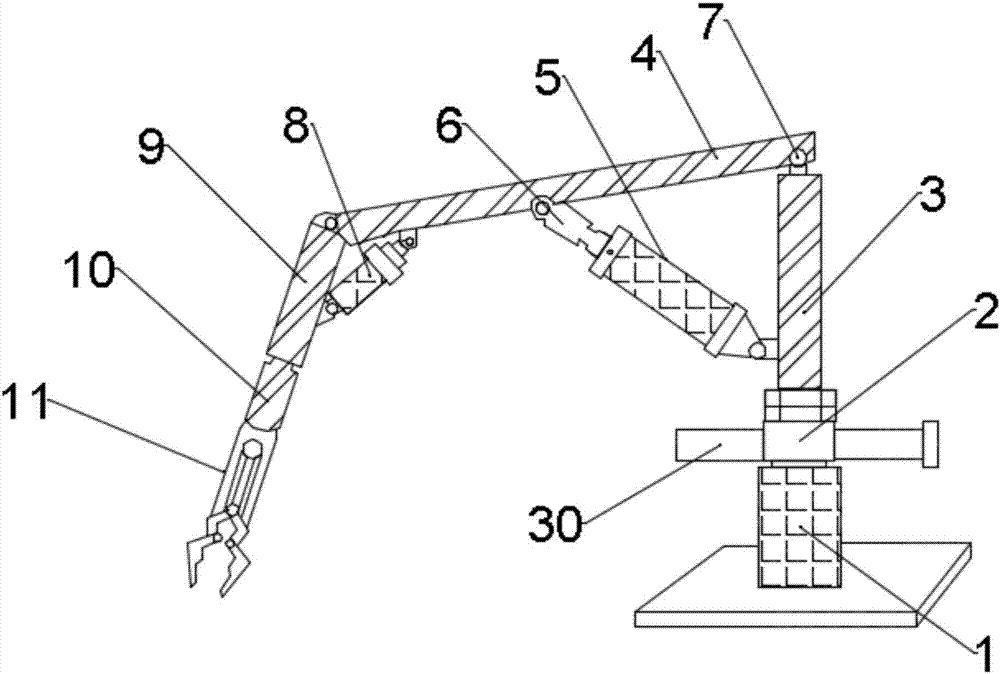
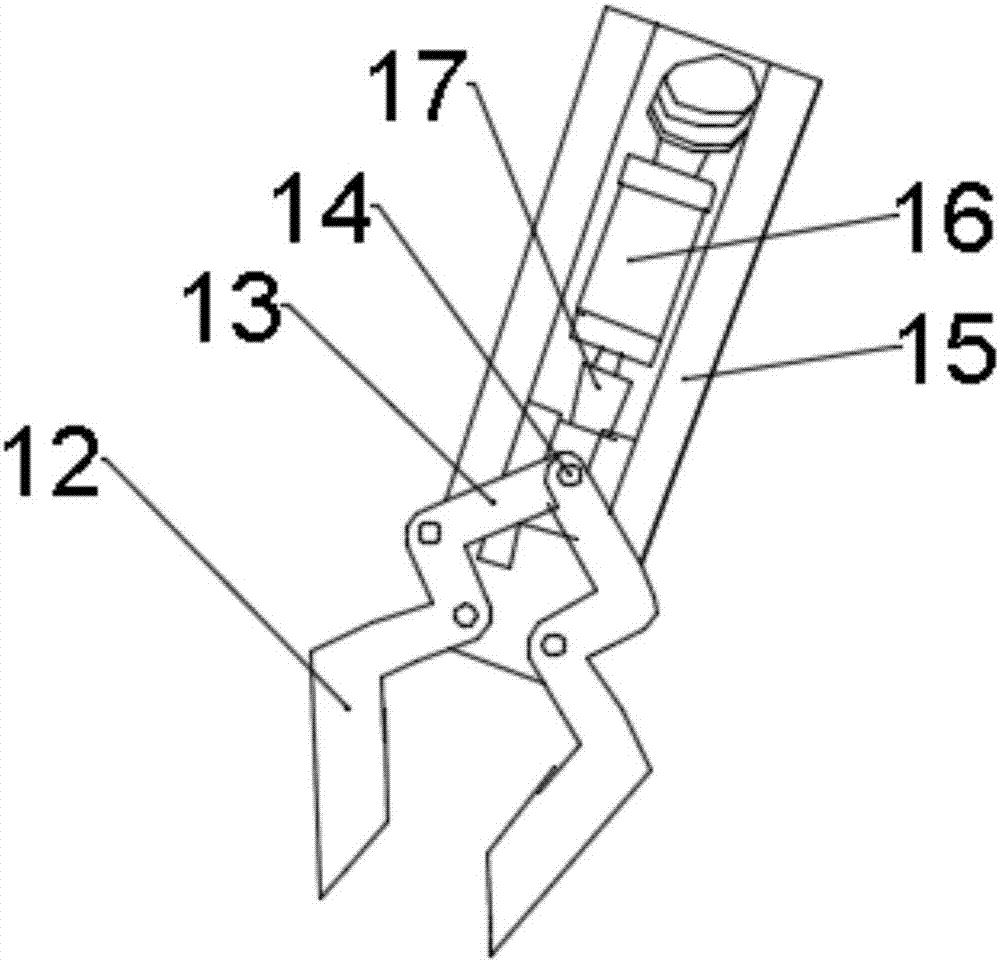
[0031] like figure 1As shown, the present invention provides a six-link mechanical arm device with adjustable degrees of freedom, including a six-linked mechanical arm device with adjustable degrees of freedom, which is characterized in that: it includes a mechanical arm connecting seat 1, and the mechanical arm The upper end of the connecting seat 1 is connected with a high-power motor 2, the upper end of the high-power motor 2 is connected with a rotating rod 3, and the left end of the rotating rod 3 is connected with a fixed-axis bending rod 4, and the fixed-axis bending rod 4 The lower left is connected with a mechanical extension rod 9, the lower end of the mechanical extension rod 9 is connected with a manipulator connecting rod 10, and the lower end of the manipulator connecting rod 10 is connected with a clamping manipulator 11, and the rotating rod 3 is connected to the fixed The shaft bending rods 4 are connected by an adjustable rotating shaft 7, and a telescopic cy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More