

Method and system for realizing automatic loading/unloading of vehicles and related equipment
A vehicle and vehicle identification technology, which is applied in the traffic control system of road vehicles, registration/instruction of vehicle operation, communication between vehicles and infrastructure, etc., can solve the problem of not realizing automatic loading and unloading
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
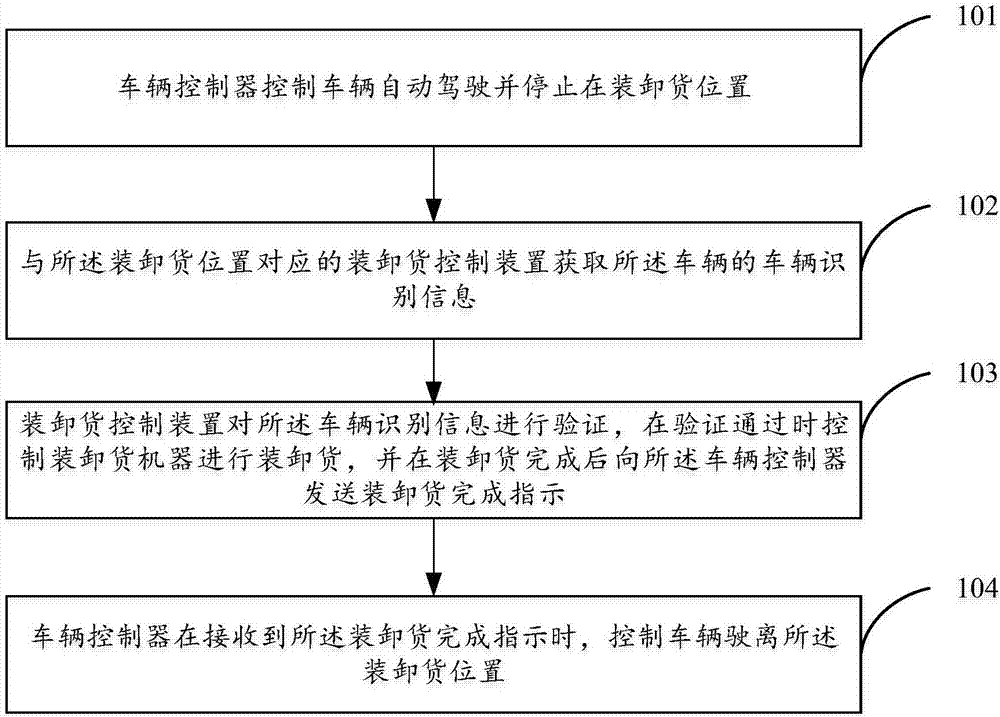
[0032] see figure 1 , which is a flowchart of a method for realizing automatic loading and unloading of vehicles in an embodiment of the present invention, the method includes:
[0033] Step 101, the vehicle controller controls the vehicle to drive automatically and stop at the loading and unloading position.
[0034] Step 102, the loading and unloading control device corresponding to the loading and unloading position acquires the vehicle identification information of the vehicle.
[0035] In the embodiment of the present invention, a corresponding loading and unloading control device may be provided for each loading and unloading position, or a corresponding loading and unloading control device may be provided for multiple adjacent loading and unloading positions.
[0036] In one example, a geomagnetic sensor may be provided at the loading and unloading position, and when the local magnetic sensor senses that the vehicle is stopped at the loading and unloading position, a v...
Embodiment 2
[0071] Based on the same idea of the method for realizing automatic loading and unloading of vehicles provided by the first embodiment, the first embodiment of the present invention also provides a system for realizing automatic loading and unloading of vehicles. The structure of the system is as follows Figure 7 As shown, it includes a vehicle controller 1, a loading and unloading control device 2 and a loading and unloading machine 3, wherein:
[0072] The vehicle controller 1 is used to control the vehicle to automatically drive and stop at the loading and unloading position; when receiving the loading and unloading completion instruction sent by the loading and unloading control device corresponding to the loading and unloading position, control the vehicle to leave the loading and unloading position ;
[0073] The loading and unloading control device 2 is used to obtain the vehicle identification information of the vehicle, and verify the vehicle identification informa...
Embodiment 3
[0086] Embodiment 3 of the present invention provides a vehicle controller, the structure of the vehicle controller is as follows Figure 8 shown, including:
[0087] A communication unit 11, configured to send and receive information;
[0088] The control unit 12 is used to control the vehicle to automatically drive and stop at the loading and unloading position; when receiving the loading and unloading completion instruction sent by the loading and unloading control device corresponding to the loading and unloading position, control the vehicle to leave the loading and unloading position.
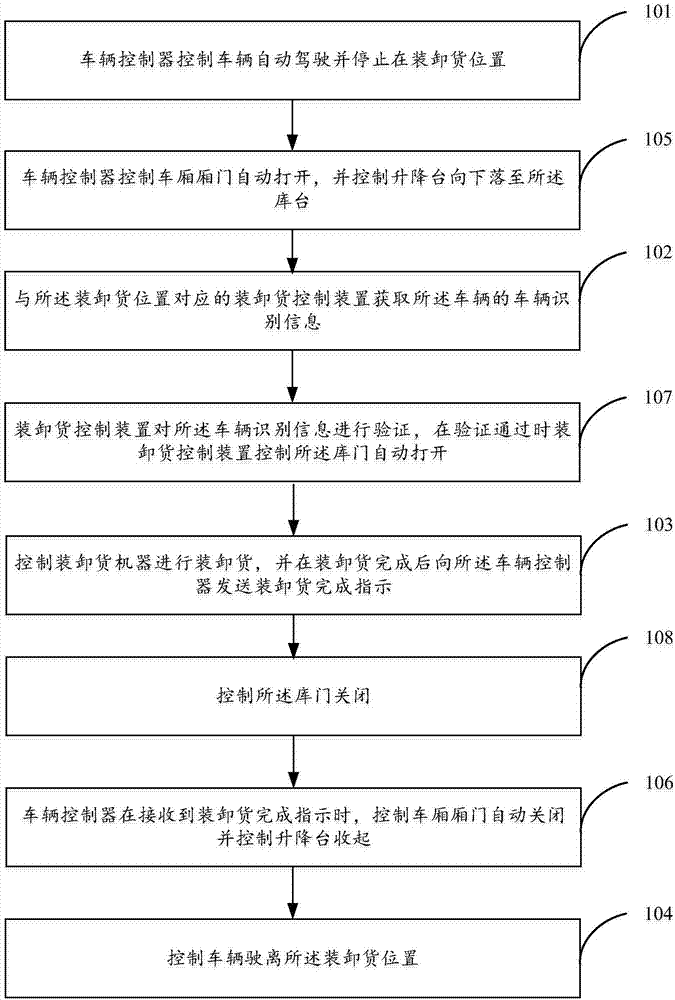
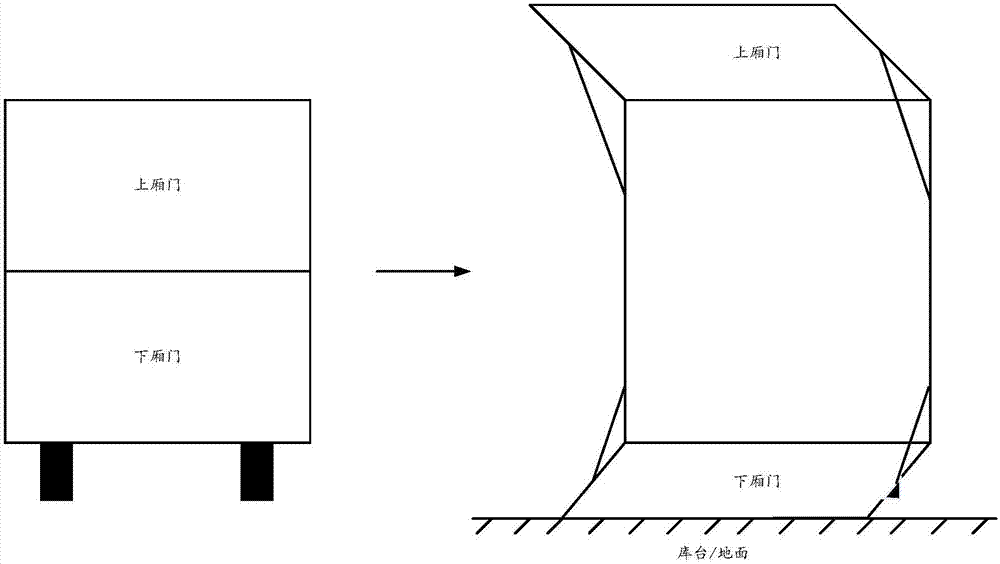
[0089] In one example, the vehicle is a van, the compartment door of the vehicle can be opened and closed by electric control, a lifting platform is provided at the lower end of the compartment door, and the loading and unloading position is in front of the warehouse door of the target warehouse. , the warehouse door has a warehouse platform; the control unit 12 is further used to: contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More