

Bionic flexible grabbing manipulator based on multistage metamorphic mechanism
A technology for grasping manipulators and metamorphic mechanisms, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low reliability, inability to grasp, and high cost, and achieve high grasping reliability, wide object-oriented, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
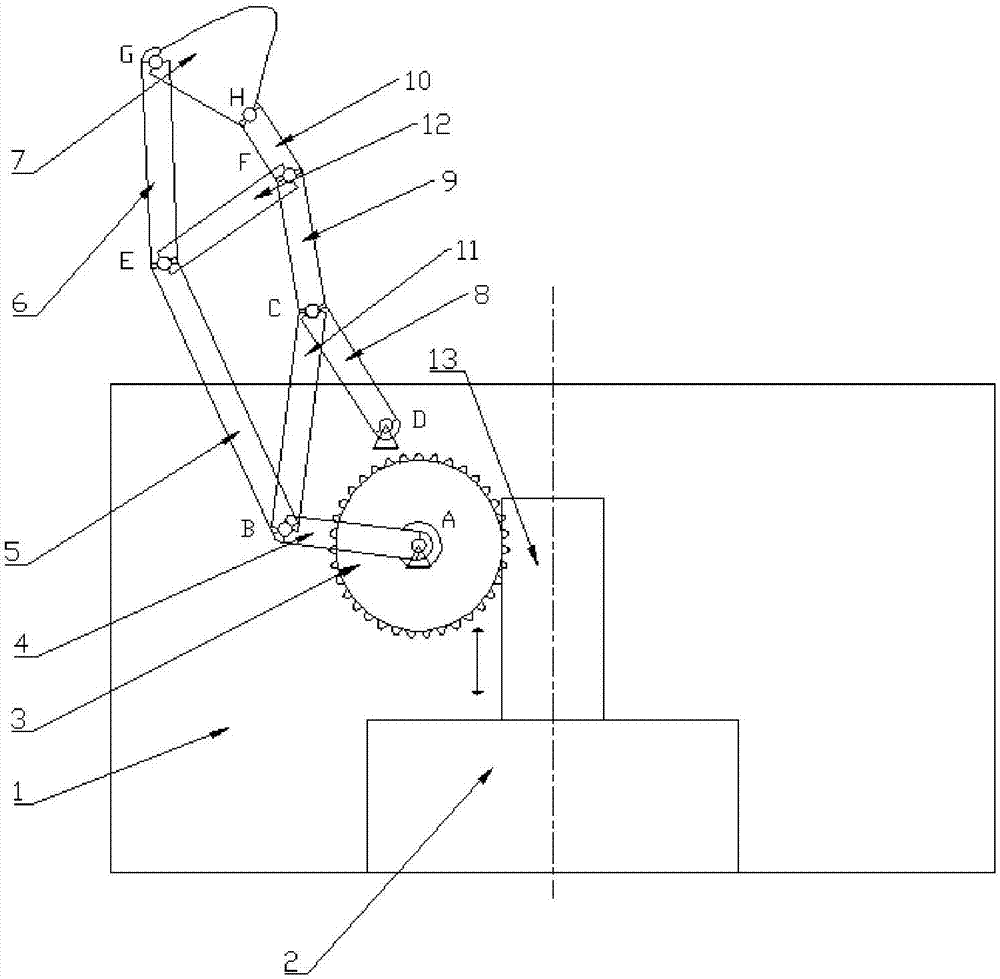
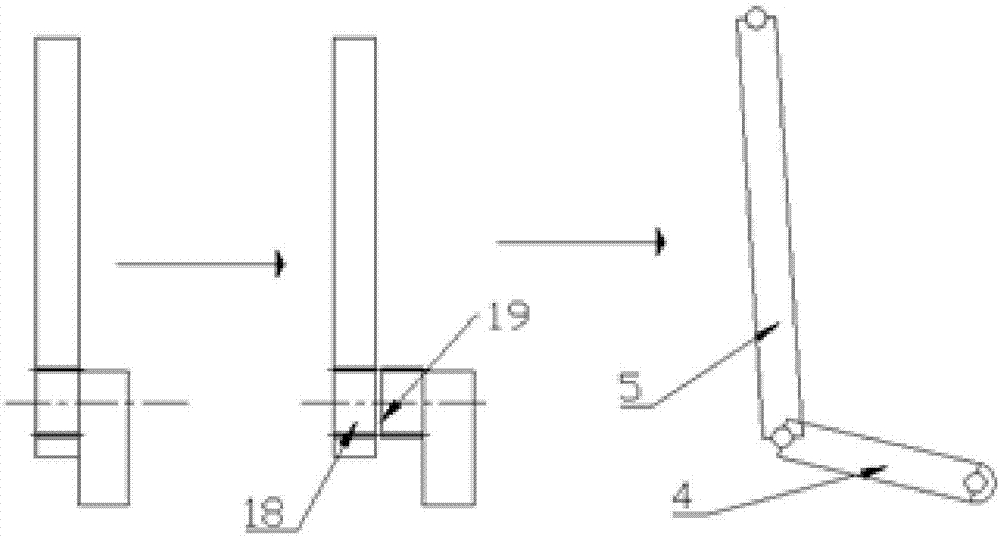
[0034] like Figure 1~6 As shown, this embodiment includes a driving mechanism 2, a base 1 and a grabbing mechanism; the grabbing mechanism includes a transmission gear 3, a transmission rack 13, an end gripper 7 and a single finger, and the single finger has three layers and four layers. rod mechanism, the single finger includes the first active rod 4, the second active rod 5, the third active rod 6, the first telescopic rod 8, the second telescopic rod 9, the third telescopic rod 10, the first transmission rod 11 and The second transmission rod 12; one end of the first active rod 4 is hinged on the base 1 and rigidly connected to the transmission gear 3, and the other end is hinged together with the first transmission rod 11 and the second active rod 5, the The other end of the second active rod 5 is hinged together with the third active rod 6 and the second transmission rod 12, and the other end of the third active rod 6 is hinged together with the end gripper 7; the first ...
Embodiment 2
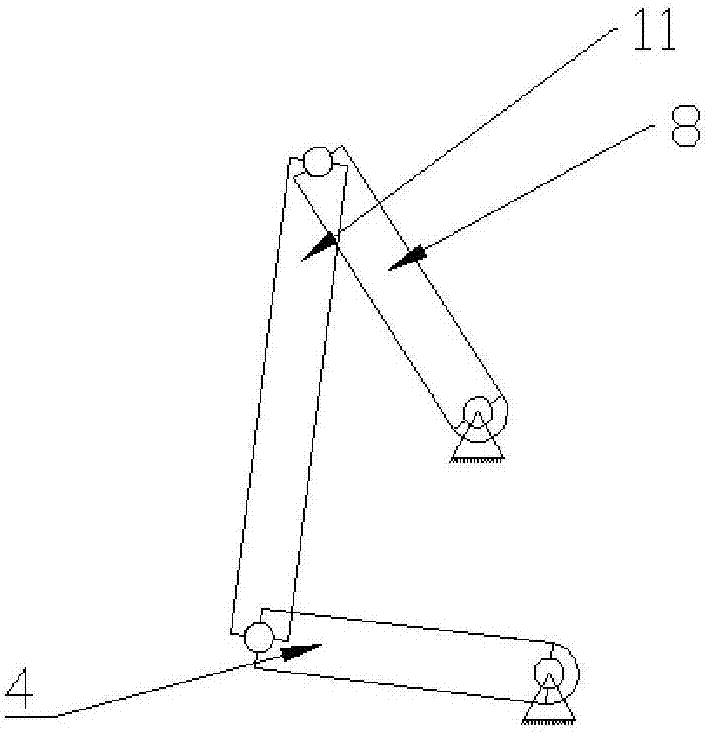
[0045] like Figure 7 As shown, the single finger of this embodiment has a two-layer four-bar mechanism, which can simulate the thumb joint. When the thumb joint forms a manipulator, its power is driven independently. The advantage is that when picking up objects on special occasions, the finger movement can be gradually driven to better meet the needs of different scenarios.
[0046] Other implementations are the same as in Example 1.
Embodiment 3
[0048] like Figure 8 As shown, there are two grasping mechanisms in this embodiment, which are arranged symmetrically along the center line of the drive mechanism 2, and the structure of the single finger is the same as that in Embodiment 1. Under the action of the same driving mechanism 2, the two transmission gears 3 are simultaneously driven to realize parallel movement.
[0049] Other implementations are the same as in Example 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More