

Synthetic aperture radar polarimetric calibration method based on reflection asymmetric information
A synthetic aperture radar, asymmetric technology, applied in the direction of radio wave reflection/re-radiation, using re-radiation, measurement devices, etc., can solve the problem that polarization calibration cannot solve the problem that distributed targets do not meet the reflection symmetry
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach 1
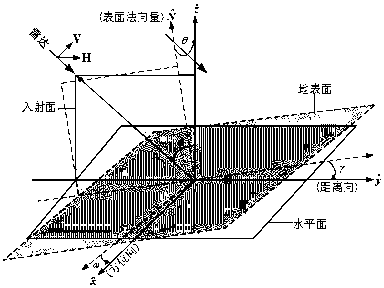
[0054] Figure 1 to Figure 2 Shows: a synthetic aperture radar polarization calibration method reflecting asymmetric information, the method includes the following steps:
[0055] Step 1: Obtain the uncalibrated data matrix [O];
[0056] Step 2: Convert the uncalibrated data into a covariance matrix, and initialize the phasors U, V, W, and Z to 0, Set to 1;
[0057] Step 3: Use initialization phasors U, V, W, Z, Adjust the variance matrix [C];
[0058] Step 4: Obtain the polarization azimuth offset matrix P corresponding to the P band through dual band registration;
[0059] Step 5: Calculate U, V, W, Z according to the offset matrix P;
[0060] Step 6: calculate again
[0061] Step 7: Use the corner reflector to judge Whether to converge, if it converges, remove the imbalance of the co-polarization channel, go to step 8; if it does not converge, use the initialization phasor U, V, W, Z, Adjust the variance matrix [C], obtain the polarization azimuth offset matrix P corresponding to...
Embodiment approach 2
[0065] On the basis of embodiment 1, the data matrix of synthetic aperture radar described in step 1 includes VV channel echo data of synthetic aperture radar, VH channel echo data of synthetic aperture radar, HH channel echo data of synthetic aperture radar, and synthetic aperture radar. HV channel echo data of aperture radar.
[0066] In this embodiment, the composition of the matrix parameters of the synthetic aperture radar is described in detail, that is, the O phasor is The Z phasor is
Embodiment approach 3
[0068] On the basis of embodiment 1, in step 3, the variance matrix [C]=[O][O] H .
[0069] This embodiment details the solution process of the variance matrix [C].
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More