

Safety device operation timing control method and device
A safety device and timing control technology, applied in the directions of pedestrian/occupant safety arrangement, measurement device, control device, etc., can solve the problem of drivers' troubles about safety device work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach >
[0027] The driving assistance device according to the present embodiment is installed in the vehicle (host vehicle) 40, and determines whether there is an object around the traveling direction (for example, in front) of the own vehicle, and when it is determined that there is an object, performs driving assistance As a method, the PCS system that performs control to avoid the collision between the target object and the host vehicle 40 or to reduce the collision damage functions.
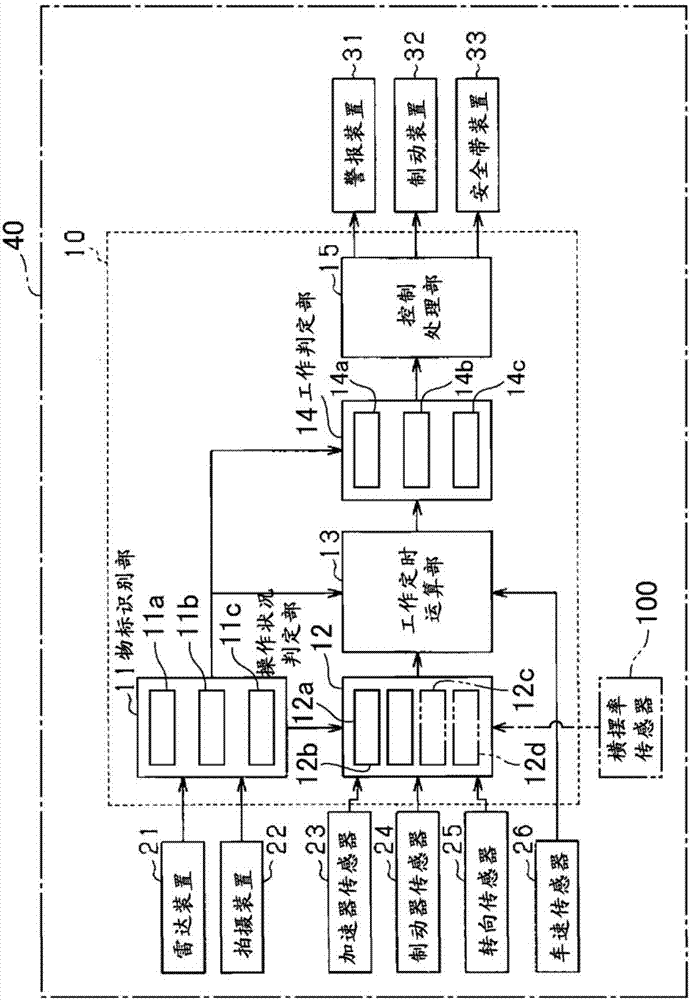
[0028] exist figure 1 Among them, the driving assistance ECU 10 as a driving assistance device is a computer including a CPU, a memory (including ROM and RAM), I / O, and the like. The driving assistance ECU 10 realizes various functions described later by the CPU executing, for example, a program installed in the ROM.
[0029] A radar device 21 , an imaging device 22 , an accelerator sensor 23 , a brake sensor 24 , a steering sensor 25 , and a vehicle speed sensor 26 are connected to the driving assi...
no. 2 approach >
[0108]The overall configuration of the driving assistance ECU 10 constituting the driving assistance device according to the second embodiment is the same as that of the driving assistance ECU 10 according to the first embodiment, but a part of the functions of the driving assistance ECU 10 according to the second embodiment and A part of the driving assistance processing is different from a part of the functions of the driving assistance ECU 10 and the driving assistance processing according to the first embodiment.
[0109] Figure 5 It is a flowchart showing an example of driving assistance processing executed by the driving assistance ECU 10 according to the second embodiment. This driving assistance process is performed for each object existing in the traveling direction of the host vehicle 40 every predetermined control cycle. In addition, in Figure 5 In , "timing" also refers to the threshold corresponding to the timing. exist Figure 5 In the driving assistance pr...
no. 3 approach >
[0119] The overall configuration of the driving assistance ECU 10 constituting the driving assistance device according to the third embodiment is the same as that of the driving assistance ECU 10 according to the first embodiment, but a part of the functions of the driving assistance ECU 10 according to the third embodiment and A part of the driving assistance processing is different from a part of the functions of the driving assistance ECU 10 and the driving assistance processing according to the first embodiment.
[0120] The operation state determination unit 12 of the driving assistance ECU 10 according to the third embodiment includes a road shape determination unit 12c (in figure 1 shown in dotted line).
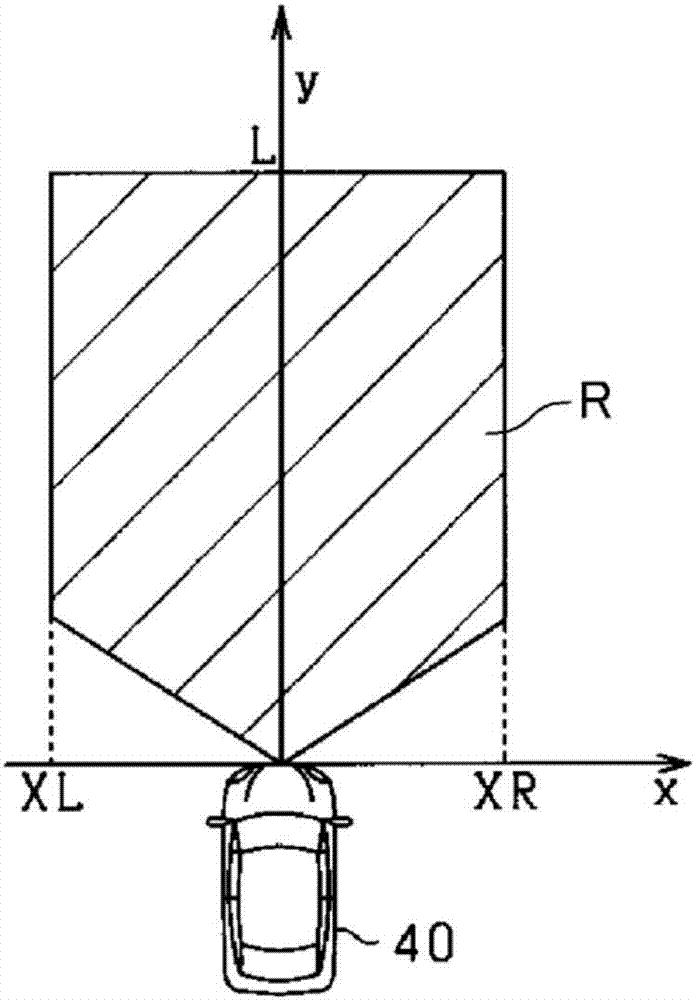
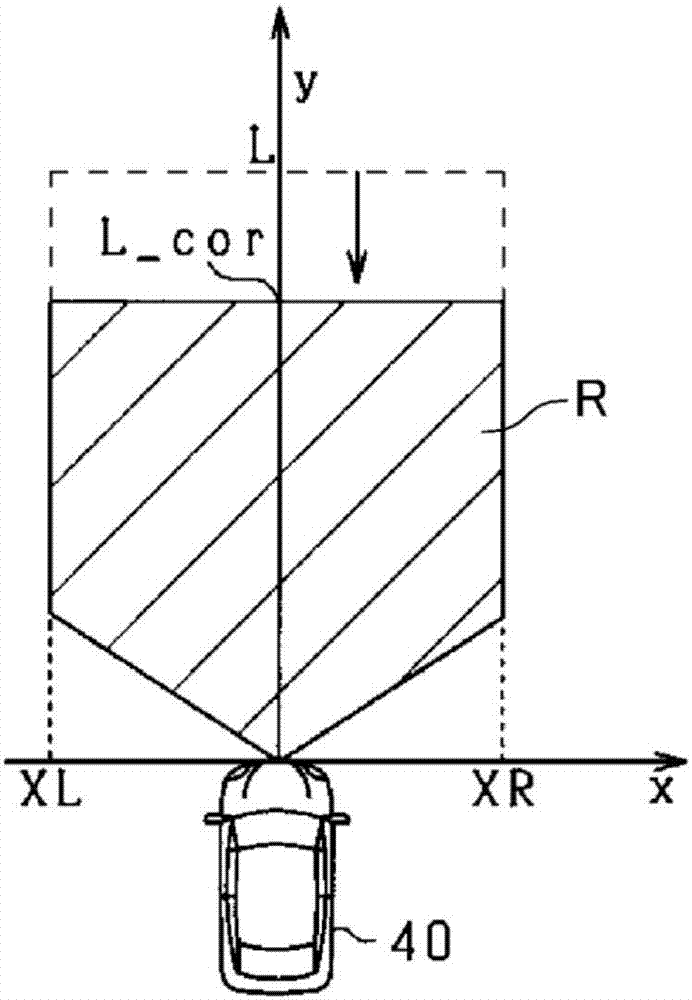
[0121] Such as Image 6 As shown, the road shape determination unit 12c extracts the lane line 50 such as the white line drawn on the road in the traveling direction of the host vehicle 40 from the second detection information. Then, the road shape determination uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More