

Autonomous landing method for unmanned aerial vehicle
A technology of unmanned aerial vehicles and landing points, which is applied in the field of autonomous landing of unmanned aerial vehicles, can solve the problems of unsatisfactory efficiency, type and accuracy of safe autonomous landing, and achieve strong practical value and flexibility, wide practicability, and safety The effect of landing precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0025] In order to further elaborate the technical solution described in the present invention, in conjunction with the accompanying drawings, the specific implementation of the present invention is as follows:
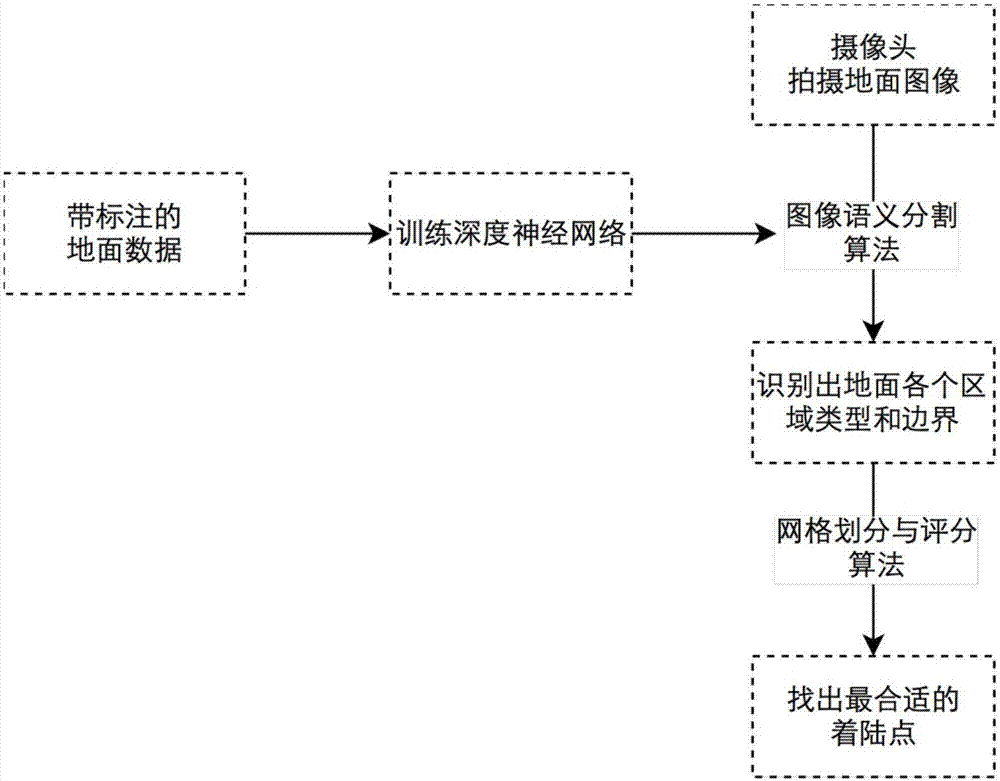
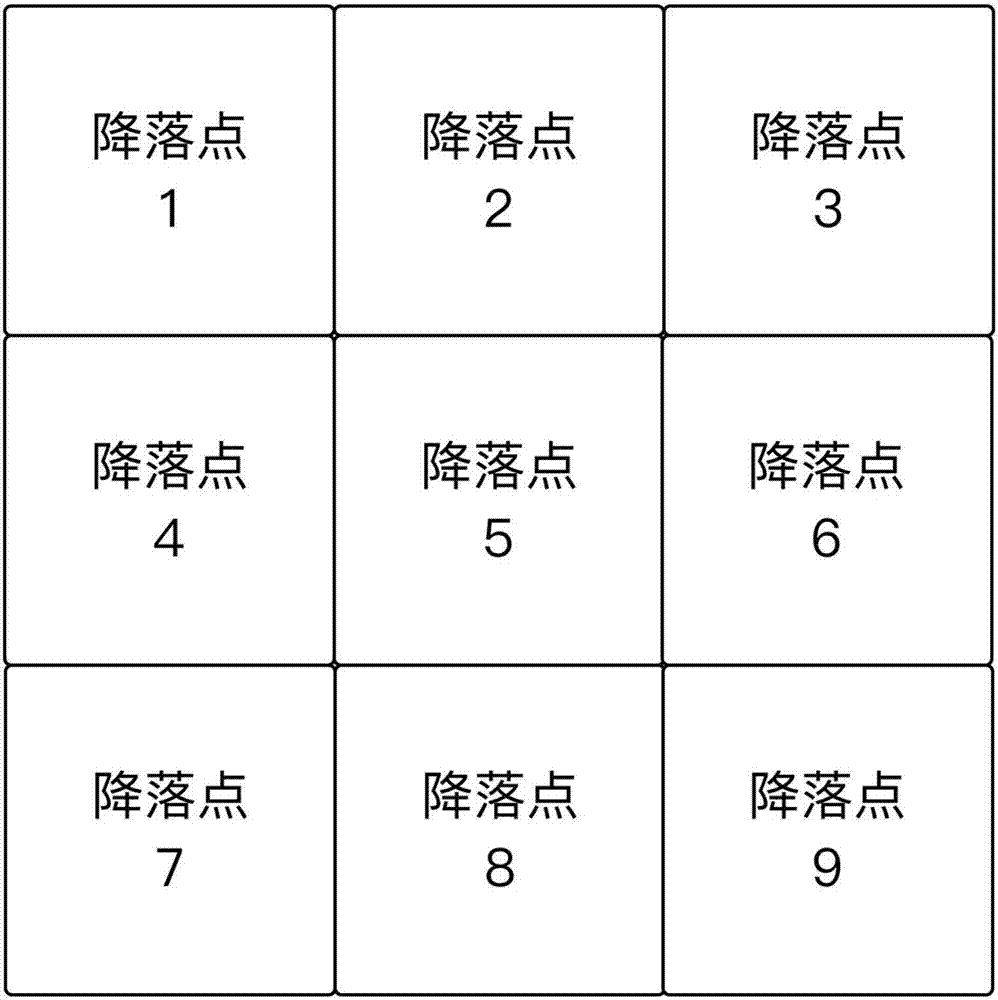
[0026] Such as figure 1 As shown, the present invention provides a method for autonomous landing of a UAV. The landing method uses a camera on the UAV to capture ground images, and uses the image semantic segmentation algorithm model obtained through deep learning model training to identify the types and types of each area of the ground image. Boundary, using the ground type and the size of the ground area to judge the best landing point, the specific process of the method is as follows:
[0027] Step 1: Take ground images through the drone equipped with a camera;
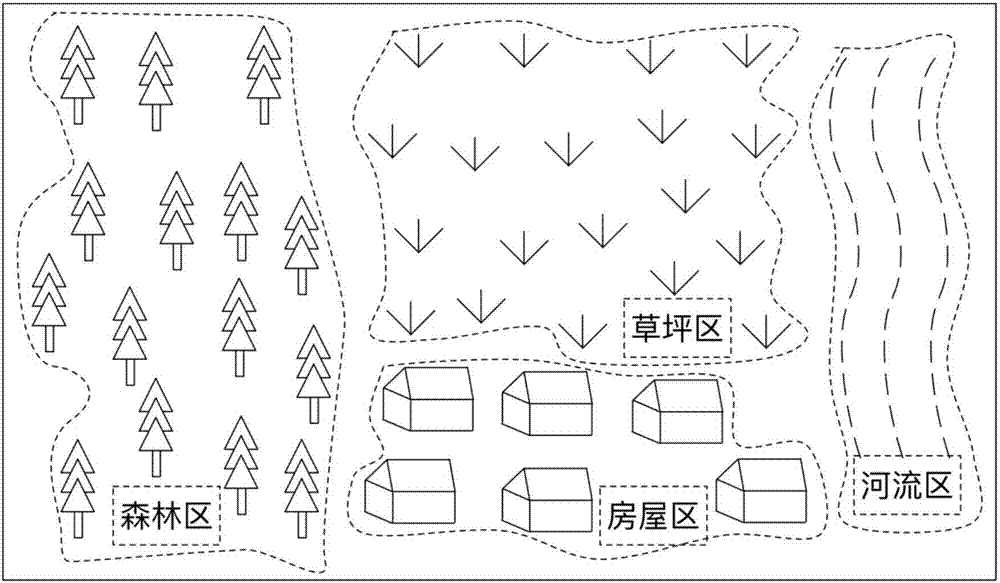
[0028] Step 2: Identify the types and boundaries of each region of the captured ground image through the image semantic segmentation algorithm model;
[0029] The image semantic segmentation algorithm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More