

Intelligent flight control method and system for fine patrol inspection of UAV
A flight control system and flight control technology, applied in the direction of control/regulation system, attitude control, non-electric variable control, etc., can solve the problems of different shooting quality, increase the difficulty of analysis, and affect work efficiency, etc. The effect of standardization of flying shooting, avoidance of manual manipulation, and quality assurance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
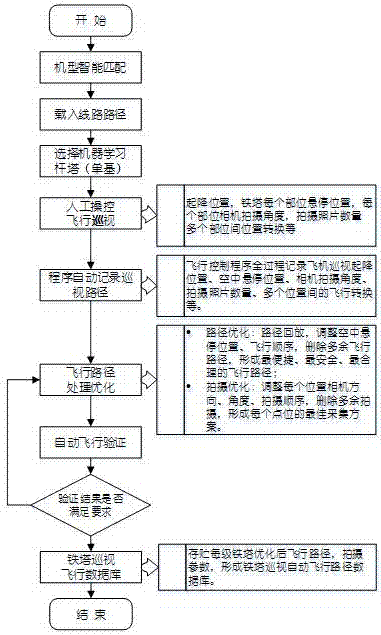
[0043] Such as Figure 1 to Figure 3 Shown is the first embodiment of the intelligent flight control method and system of the UAV refined inspection of the present invention, as Figure 1 to Figure 2 As shown, the control method includes the following steps:
[0044] S1. First, intelligently match the UAV, load the route path, and select the tower to be learned by the UAV;
[0045] S2. After step S1, plan and design the flight acquisition path in detail, manually control the UAV flight inspection, and the flight control program automatically records the manually controlled path parameters and shooting parameters;
[0046] S3. After step S2, replay and optimize the path parameters, adjust the path parameters, and delete redundant flight paths to optimize the flight path; replay and optimize the shooting parameters, adjust the shooting parameters, and delete redundant shots to form each The best acquisition plan for the point;
[0047] S4. After step S3, load the optimized pa...
Embodiment 2
[0058] When the iron tower is a single-circuit straight line tower for transmission lines, the transmission line is a 1000kV transmission line, and the iron tower is a wine glass-shaped iron tower, such as Figure 4 As shown, the order of the UAV's refined inspection air path is:
[0059] 1) The UAV takes off from the takeoff and landing position near the iron tower.
[0060] 2) First fly to hover position 1, and the direction of the line is the tower on the right:
[0061] a) Adjust the UAV camera lens vertically downward, and take photos of the tower foot;
[0062] b) Adjust the camera lens of the UAV to be horizontal to the tower body, and take pictures of equipment such as the nameplate of the tower line.
[0063] 3) Fly to the hovering position 2, and the forward direction of the line is the right wire:
[0064] a) Adjust the UAV camera lens horizontally to the forward direction of the line, and take pictures of equipment such as wires and anti-vibration hammers in the...
Embodiment 3
[0083] When the iron tower is a double-circuit right-angle tower of an AC transmission line, the transmission line is a 1000kV AC transmission line, and the iron tower is a dry-shaped iron tower, such as Figure 5 As shown, the order of the UAV's refined inspection air path is:
[0084] 1) The plane takes off from the take-off and landing position near the iron tower.
[0085] 2) First fly to the hovering position 1, and the direction of the route is the right tower body. The shooting sequence is as follows:
[0086] a) Adjust the camera lens of the aircraft vertically downward, and take photos of the tower foot;
[0087] b) Adjust the camera lens of the aircraft to be horizontal to the tower body, and take photos of equipment such as the line nameplate of the tower.
[0088] 3) Fly to hovering position 2, the shooting order of the wire on the right side of the line is as follows:
[0089] a) Adjust the camera lens of the aircraft horizontally to the forward direction of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More