

Obstacle avoidance method and system for unmanned aerial vehicle
An unmanned aerial vehicle and obstacle avoidance technology, applied in the field of unmanned aerial vehicles, can solve the problems of insufficient obstacle avoidance and low obstacle avoidance accuracy of unmanned aerial vehicles, and achieve high accuracy, high degree of intelligent obstacle avoidance, flight Path accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
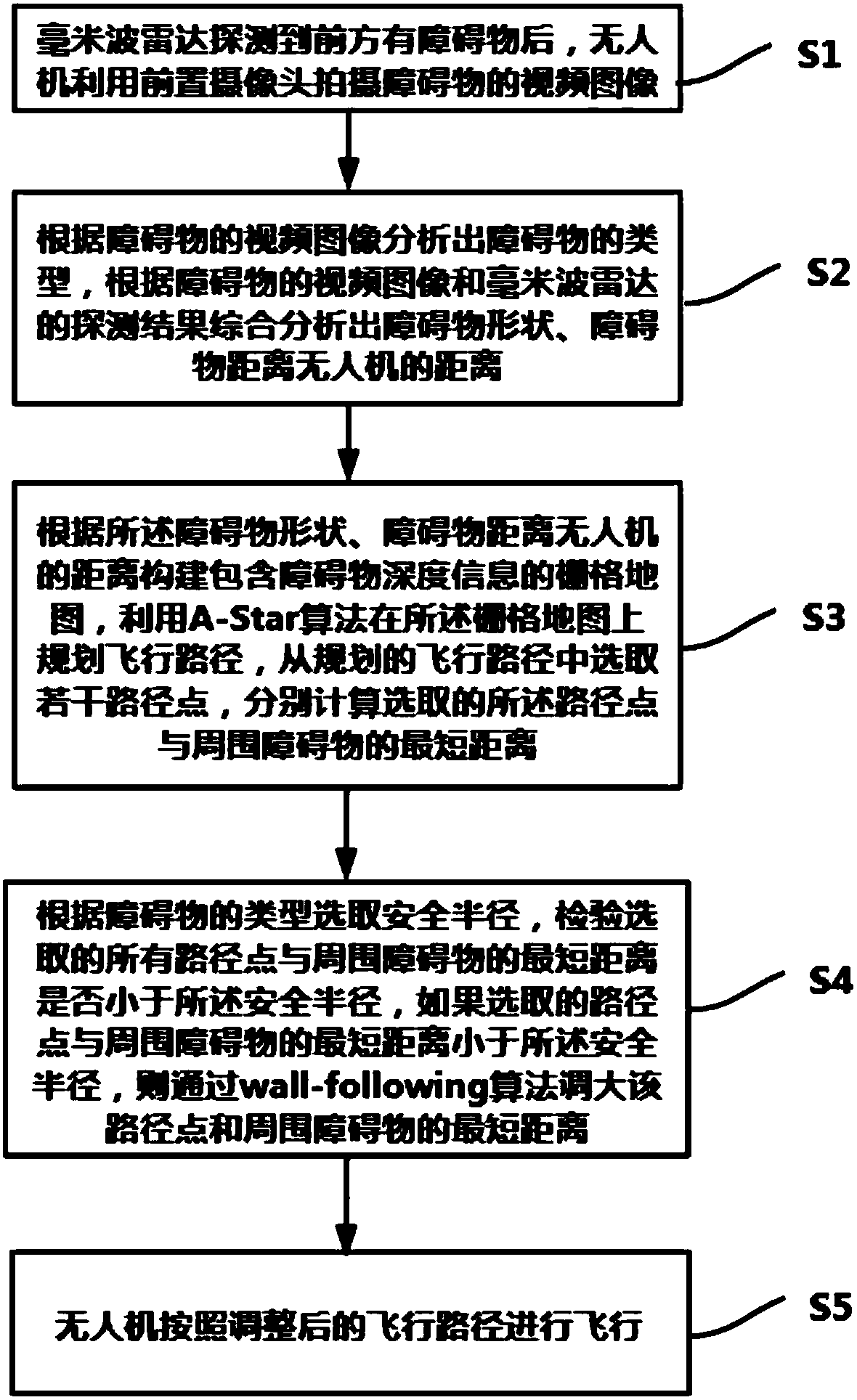
[0022] The invention provides a method for avoiding obstacles of an unmanned aerial vehicle, comprising:
[0023] S1. After the millimeter-wave radar detects an obstacle in front, the UAV uses the front camera to take a video image of the obstacle;
[0024] S2. Analyze the type of obstacle according to the video image of the obstacle, and comprehensively analyze the shape of the obstacle and the distance between the obstacle and the drone according to the video image of the obstacle and the detection results of the millimeter wave radar;
[0025] S3. Construct a grid map containing obstacle depth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More