

Method and system for self-adaptive adjustment of mechanical claw grip force of claw machine
A technology of self-adaptive adjustment and mechanical claw, which is applied in manipulators, program-controlled manipulators, indoor games, etc., can solve problems such as the inability to have uniform standards, the error of adjustment results, and the accurate grasp of operating profits.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
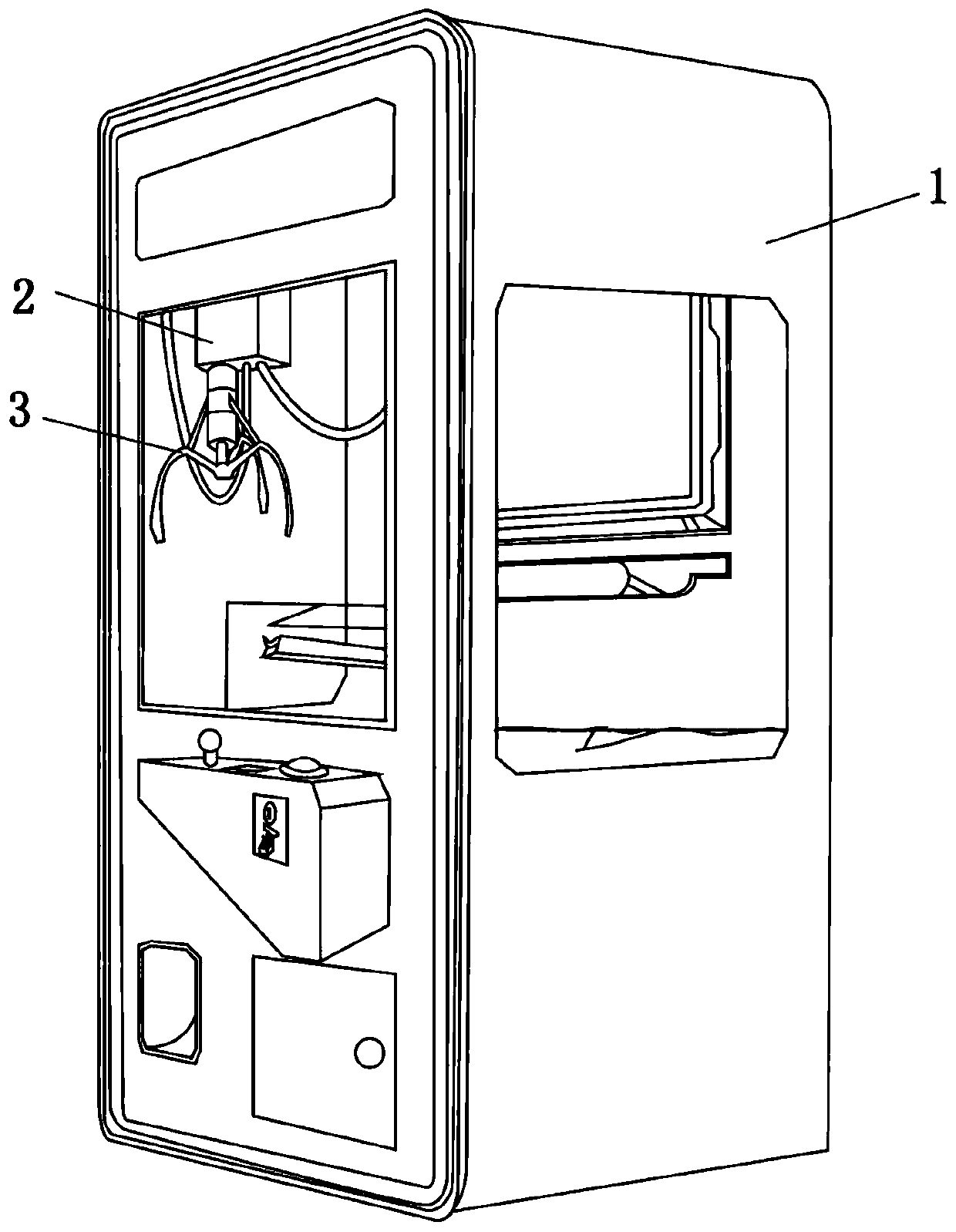
[0033] like figure 1 As shown, the claw machine includes a power supply, a chassis 1 and a crane 2 installed in the chassis 1, a mechanical claw 3 is installed below the crane 2, and the mechanical claw 3 is connected to a motor, and the power supply is connected to the mechanical claw drive circuit. The motor is electrically connected, and the gripping force of the mechanical claw 3 is determined by the driving voltage output from the mechanical claw driving circuit to the motor.
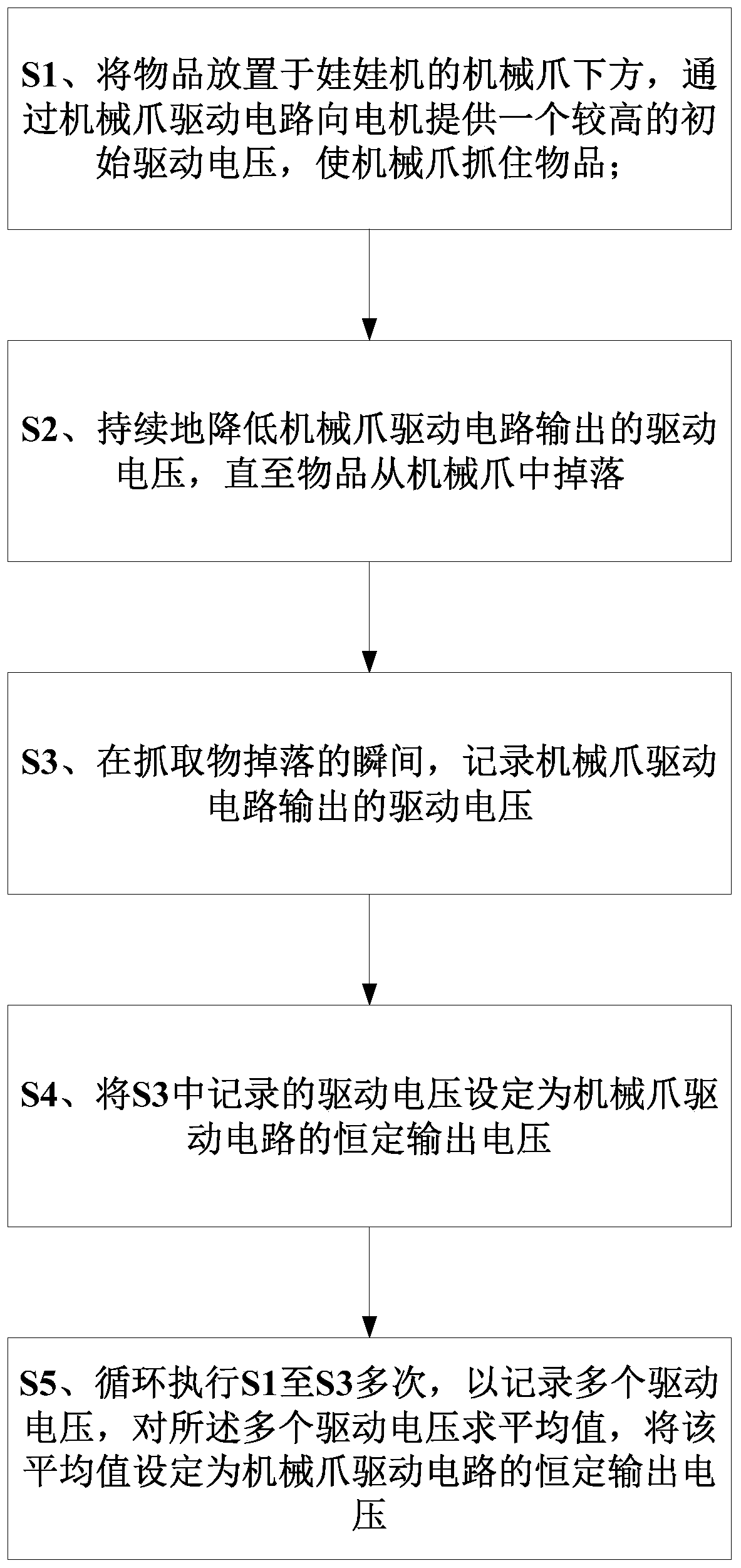
[0034] like figure 2 As shown, specifically, a method for adaptively adjusting the grasping force of mechanical claws of a doll machine provided by the present invention includes:
[0035] S1. Place the item under the mechanical claw of the claw machine, and provide a high initial driving voltage to the motor through the mechanical claw drive circuit, so that the mechanical claw can grab the object;
[0036] S2. Continuously reduce the driving voltage output by the mechanical claw drive circuit ...
Embodiment 2
[0043] The present invention also provides an adaptive adjustment system for mechanical claw gripping force of a doll machine, which includes:
[0044] The driving voltage adjustment module is used to adjust the driving voltage value output by the mechanical claw driving circuit to the motor; before the adjustment starts, the mechanical claw driving circuit outputs a higher initial driving voltage so that the mechanical claw can grasp the object; after the adjustment starts , continuously reducing the drive voltage output by the mechanical claw drive circuit;
[0045] The item drop detection module is used to detect whether the item grasped by the mechanical claw has fallen, and when the item falls, it sends a signal to the voltage recording module;
[0046] The voltage recording module is used to record the driving voltage output by the mechanical claw driving circuit after receiving the signal sent by the object drop detection module;
[0047] The voltage setting module is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More