

Six-axis mechanical arm
A six-axis manipulator, the sixth technology, applied in the field of robots, can solve the problems of easy deformation of the six-axis manipulator, and achieve the effects of not being easily deformed, ensuring stability, and running smoothly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
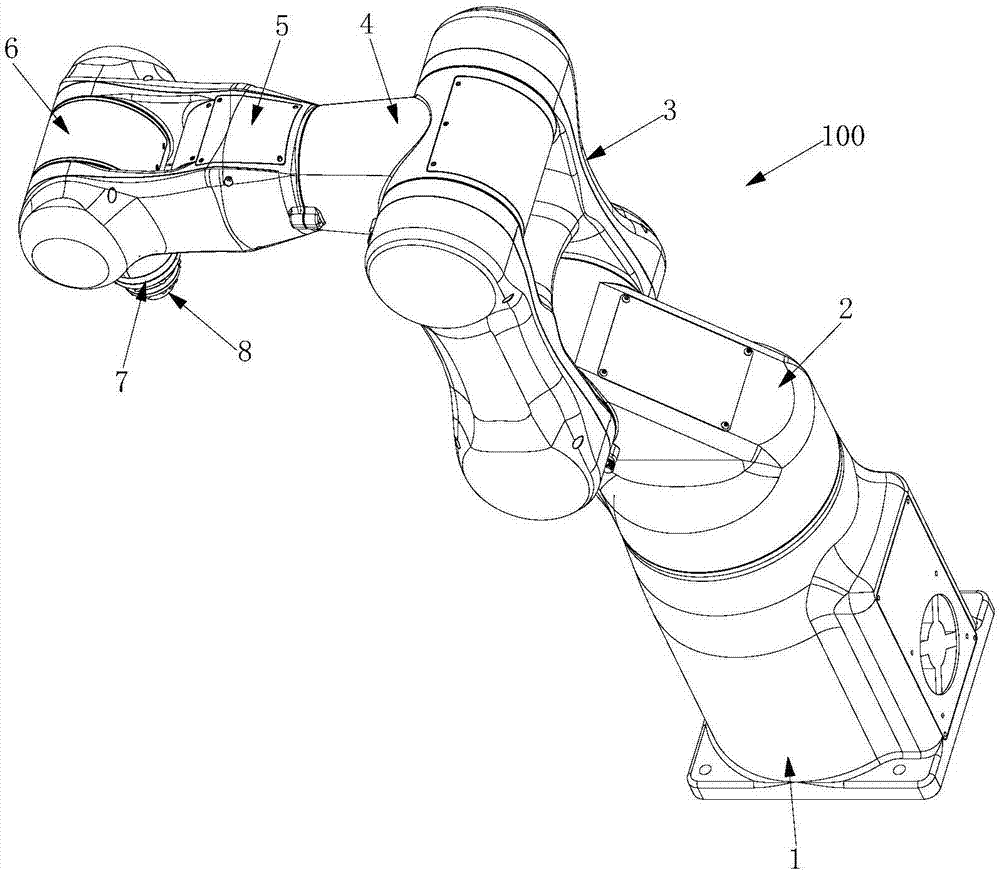
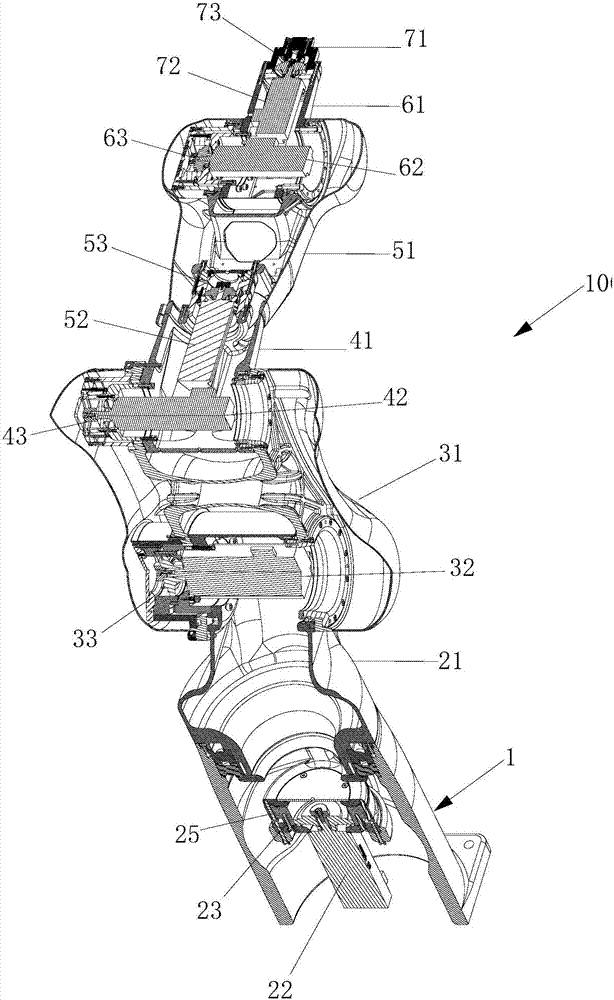
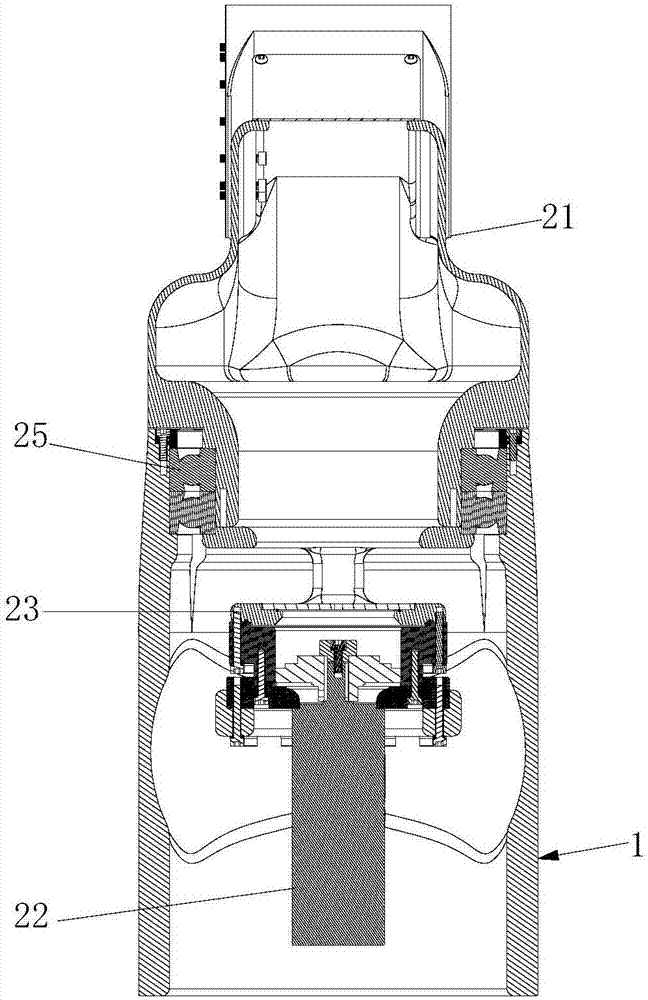
[0030] Such as figure 1 and figure 2 As shown, a six-axis manipulator 100 in a preferred embodiment of the present invention includes: a base 1, an actuator, and a first joint 2, a second joint 3, a third joint 4, a fourth joint 5, and a fifth joint that are sequentially connected by transmission. The joint 6 and the sixth joint 7, the output end of the sixth joint 7 is connected with the actuator.
[0031] The aforementioned six-axis manipulator 100 can make the six-axis The axis manipulator 100 forms an articulated mechanical structure and has 6 degrees of freedom. Exemplarily, among the 6 degrees of freedom, 3 of them can be used to determine the position of the act...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More