Flexible pneumatic manipulator
A pneumatic manipulator and flexible technology, applied in the field of manipulators, can solve the problems of poor applicability and high cost, and achieve the effect of rapid manufacturing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
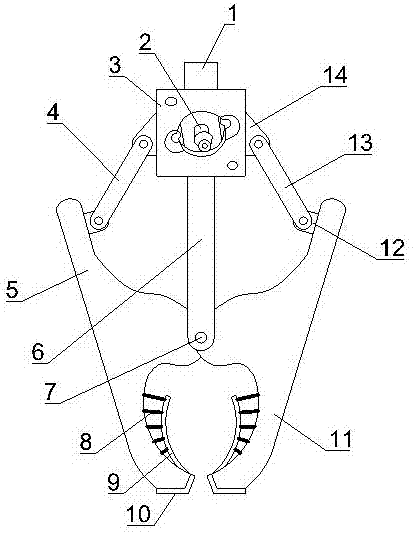
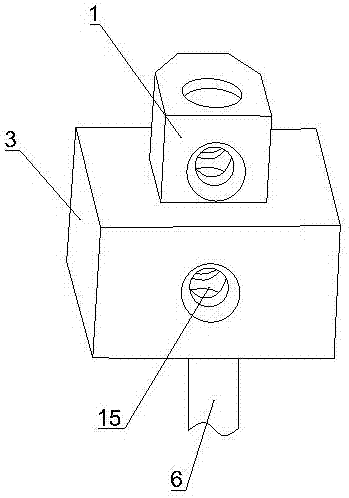
[0016] see Figure 1~2 , in an embodiment of the present invention, a flexible pneumatic manipulator includes an air guide module 3, a pneumatic rod 6, a first clamping arm 11 and a second clamping arm 5, the air guide module 3 is made by 3D printing process, The air guide module 3 includes an air inlet port 2 on the front, an air outlet port 15 on the back, an installation adapter block 1 on the top that is adapted to the mechanical arm, and a telescopic pneu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More