

Stone clamping device for excavating robot
A technology of robots and stones, which is applied in the direction of chucks, manipulators, and manufacturing tools, can solve the problems of low stone clamping efficiency, and achieve the effect of improving clamping efficiency, tight adsorption, and smooth stone surface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Further detailed explanation through specific implementation mode below:
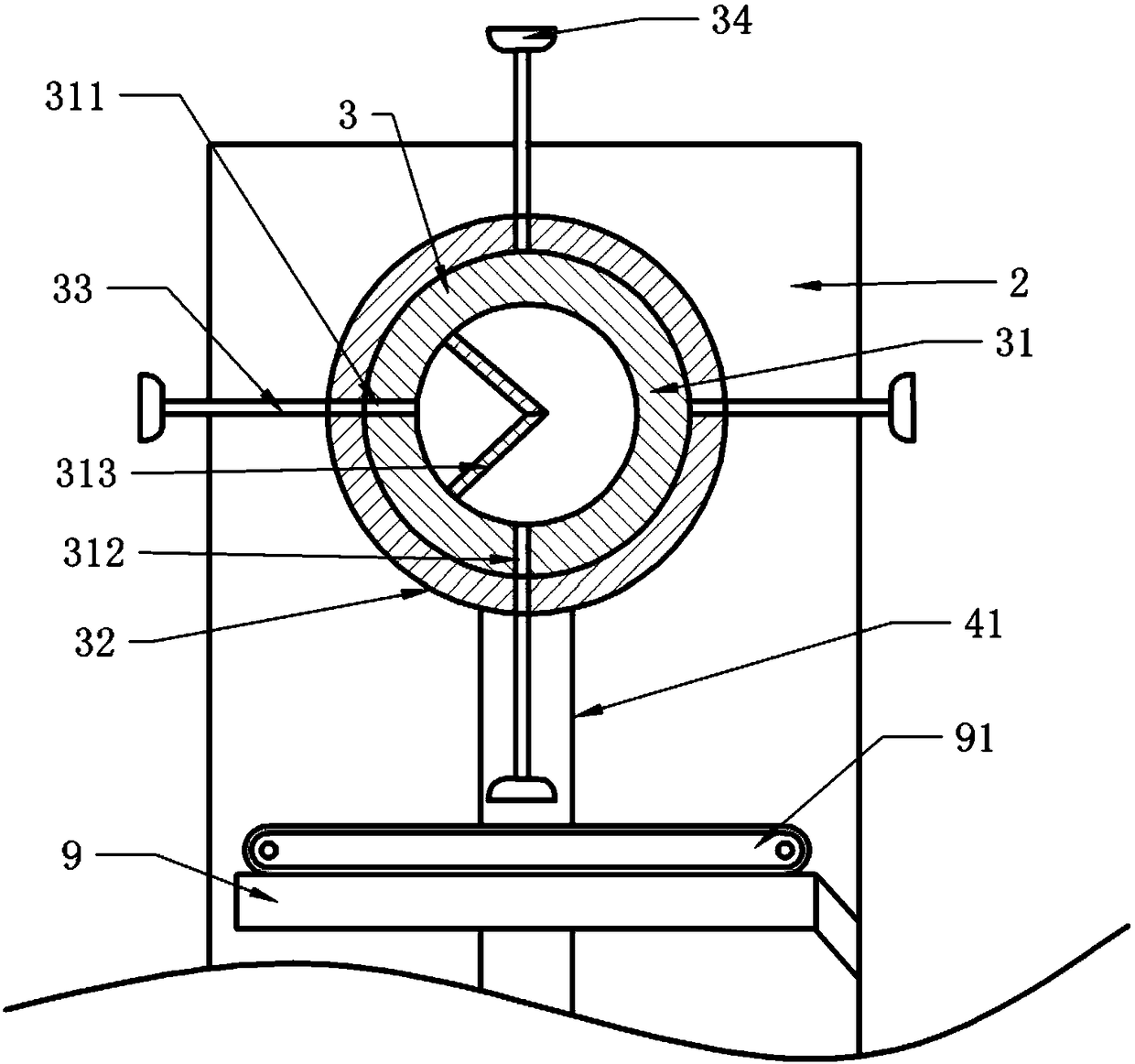
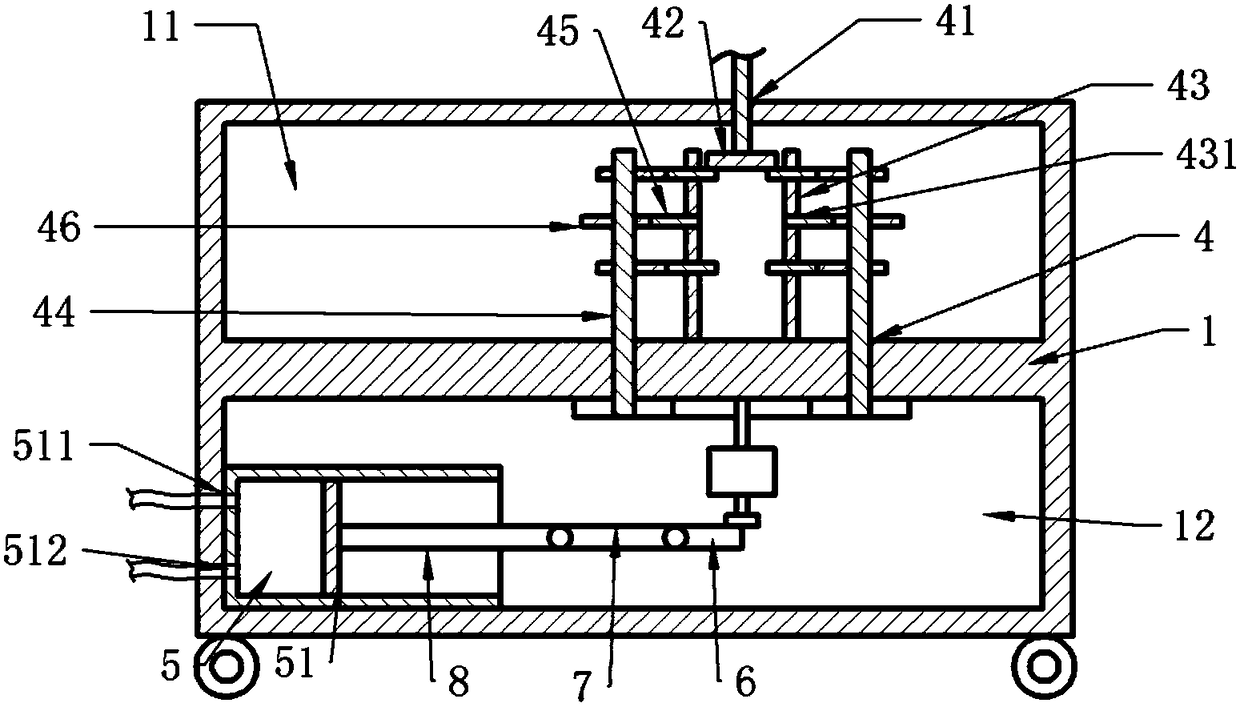
[0031] The reference signs in the drawings of the description include: base 1, adjustment cavity 11, cavity 12, support plate 2, clamping mechanism 3, installation shaft 31, first through hole 311, second through hole 312, baffle 313 , rotating roller 32, connecting rod 33, industrial vacuum sucker 34, adjustment mechanism 4, support rod 41, mobile table 42, support plate 43, transverse groove 431, rotating shaft 44, support block 45, cam 46, piston barrel 5, piston 51 , the air inlet 511, the air outlet 512, the first pole 6, the second pole 7, the third pole 8, the bearing table 9, the conveyor belt 91.
[0032] The embodiment is basically as attached figure 1 Shown:
[0033]A stone clamping device for an excavating robot, comprising a base 1, the bottom of the base 1 is provided with rollers, the base 1 is provided with an adjustment cavity 11 and a cavity 12, and the adjustment cavity 11 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More