

Hopping robot capable of actively adjusting attitude before falling to ground
A robotic and active technology, applied in the field of robotics, which can solve problems such as rollover and side fall, damage to key parts of the robot hitting the ground, and complex mechanical structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
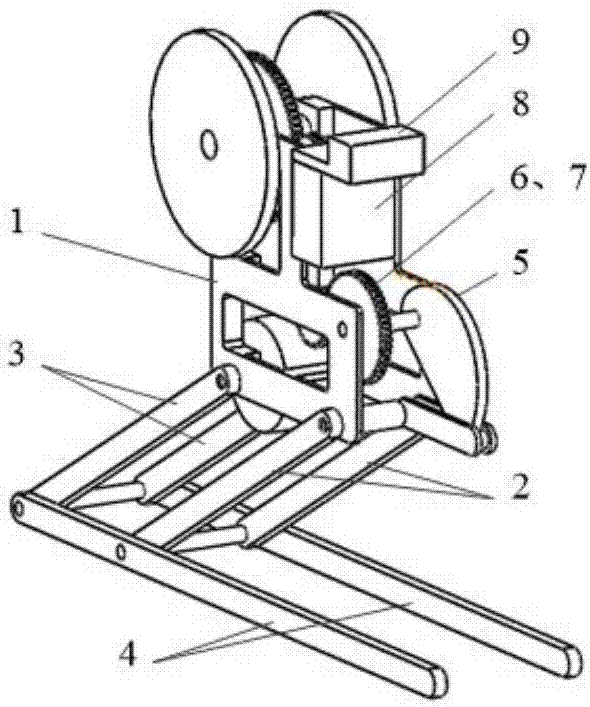
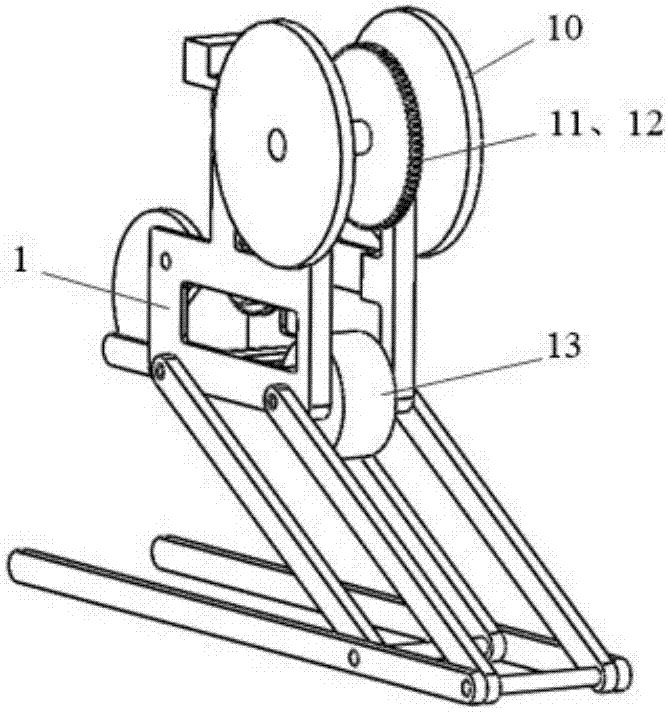
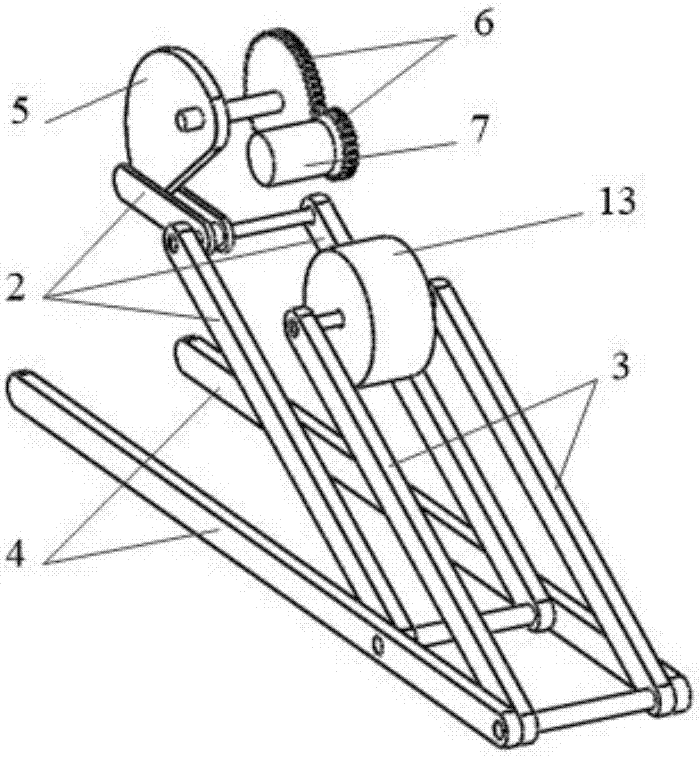
[0028] Such as Figure 1a to Figure 5 As shown, it includes frame 1, thigh 2, auxiliary leg 3, calf 4, cam 5, cam reduction gear 6, cam drive motor 7, battery pack module 8, perception control module 9, flywheel 10, flywheel reduction gear 11, flywheel Drive motor 12, variable stiffness elastic joint 13.
[0029] In the above scheme, the lower ends of the thigh 2 and the auxiliary leg 3 are hinged on the calf 4, the middle part of the thigh 2 is hinged on the frame 1, and the upper end is in close contact with the cam 5, and the upper end of the auxiliary leg 3 is hinged on the variable stiffness elastic joint 13, and connected On the frame 1; the cam drive motor 7 rotates, and after the cam reduction gear 6 decelerates, the cam 5 is driven to rotate. Since the upper end of the thigh 2 is in close contact with the cam 5, the angle between the thigh 2 and the frame 1 is changed; the frame 1. The thigh 2, the auxiliary leg 3, and the lower leg 4 constitute a parallelogram mecha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More