

Gyroscope-based GPS packet capture time interval determination method during curve driving process
A technology of time interval and determination method, applied in the directions of instruments, satellite radio beacon positioning systems, measuring devices, etc., can solve the problem of discrepancy between the drawn path of the CD segment and the actual path, and achieve the effect of ensuring driving safety and obtaining accurate positioning data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
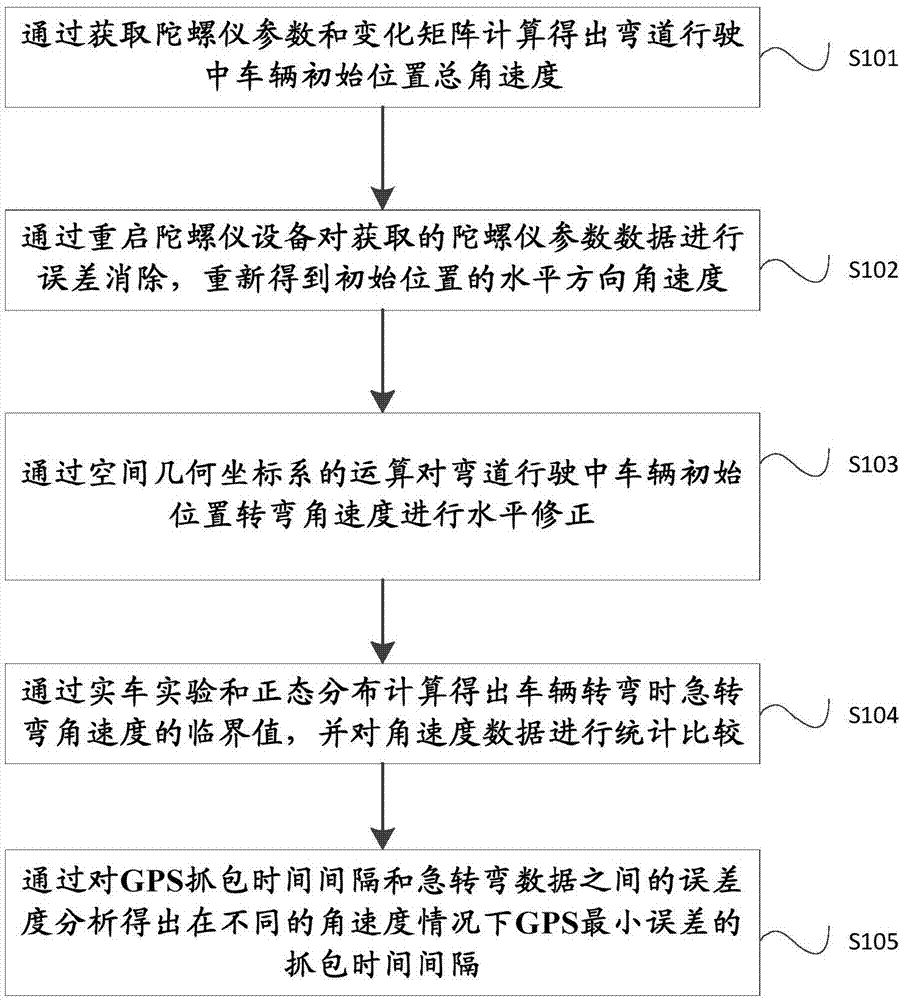
[0048] The present invention provides a method for determining the time interval of GPS capturing packets based on the gyroscope in the curve driving process, such as figure 1 , Figure 3 ~ Figure 7 As shown, a preferred embodiment of the present invention is shown therein. Specifically, the method for determining the time interval of GPS packet capture includes the following steps:
[0049] In step S101, the total angular velocity of the initial position of the vehicle during the curve is calculated by obtaining the gyroscope parameters and the change matrix.
[0050] Step S102, by restarting the gyroscope device, performing error elimination on the acquired gyroscope parameter data, and obtaining the horizontal angular velocity at the initial position again.
[0051] Step S103, perform horizontal correction on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More