

Transverse and longitudinal coordination control trajectory following up control method of unmanned vehicle
An unmanned vehicle and coordinated control technology, applied in the direction of control devices, etc., can solve the problems that PID control is difficult to achieve accurate control, poor robustness, poor control accuracy, etc., so as to reduce the parameter tuning process and eliminate control errors. , the effect of saving manpower and material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
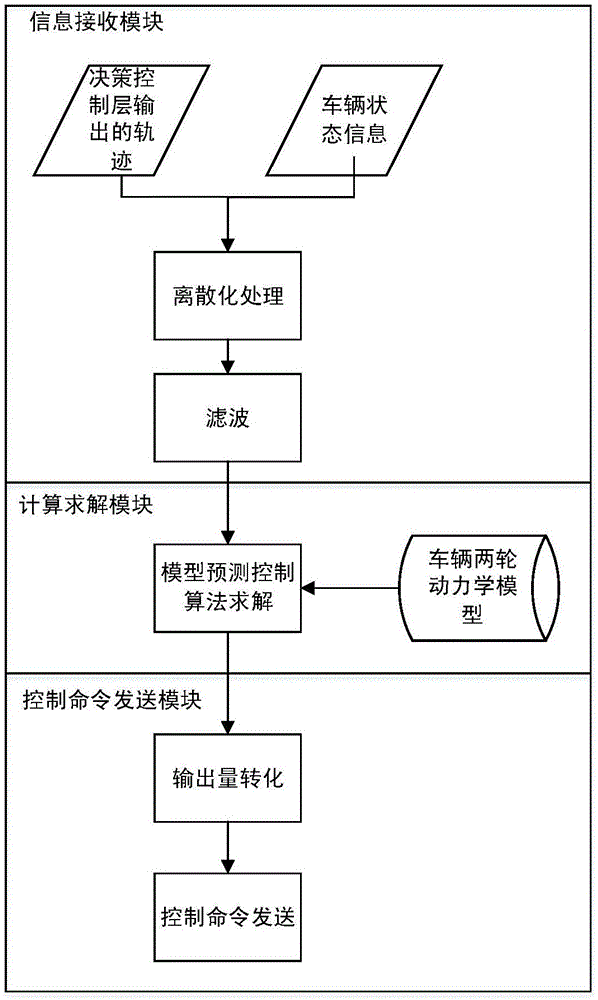
[0014] see Figure 1 to Figure 2 Shown:
[0015] The first is the reception of information; the information receiving module is divided into two parts, one part is the receiving part of the future driving trajectory of the unmanned vehicle, which provides an interface with the decision-making layer, accepts the future driving trajectory output by the decision-making system of the unmanned vehicle, and then sends the received The continuous trajectory data including speed, relative geodetic coordinate system position, and heading angle are discretized according to the control cycle and then sent to the calculation and solution module; the other part is the current state information receiving module of the vehicle, which receives and sends the relative geodetic coordinate system of the vehicle acquired and sent by the sensor itself The actual position of the vehicle, the transverse and longitudinal velocity of the vehicle, the transverse and longitudinal acceleration, the headin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More